4. Operation
4.2 Operation in Positioner Mode
4-40 ME0342-4B
(2) Infinite Rotation Control
Making the shortcut selection valid and moving the actuator in a specific direction continuously
allows the actuator to be rotated continuously as a motor. The continuous operation can be
done as described below.
[Operation Examples]
This example rotates the actuator by 2 turns and finally stops it at position No.4.
Enter position data assuming
1° = 1mm.
(Example) 1.2 is assumed as 1.2°.
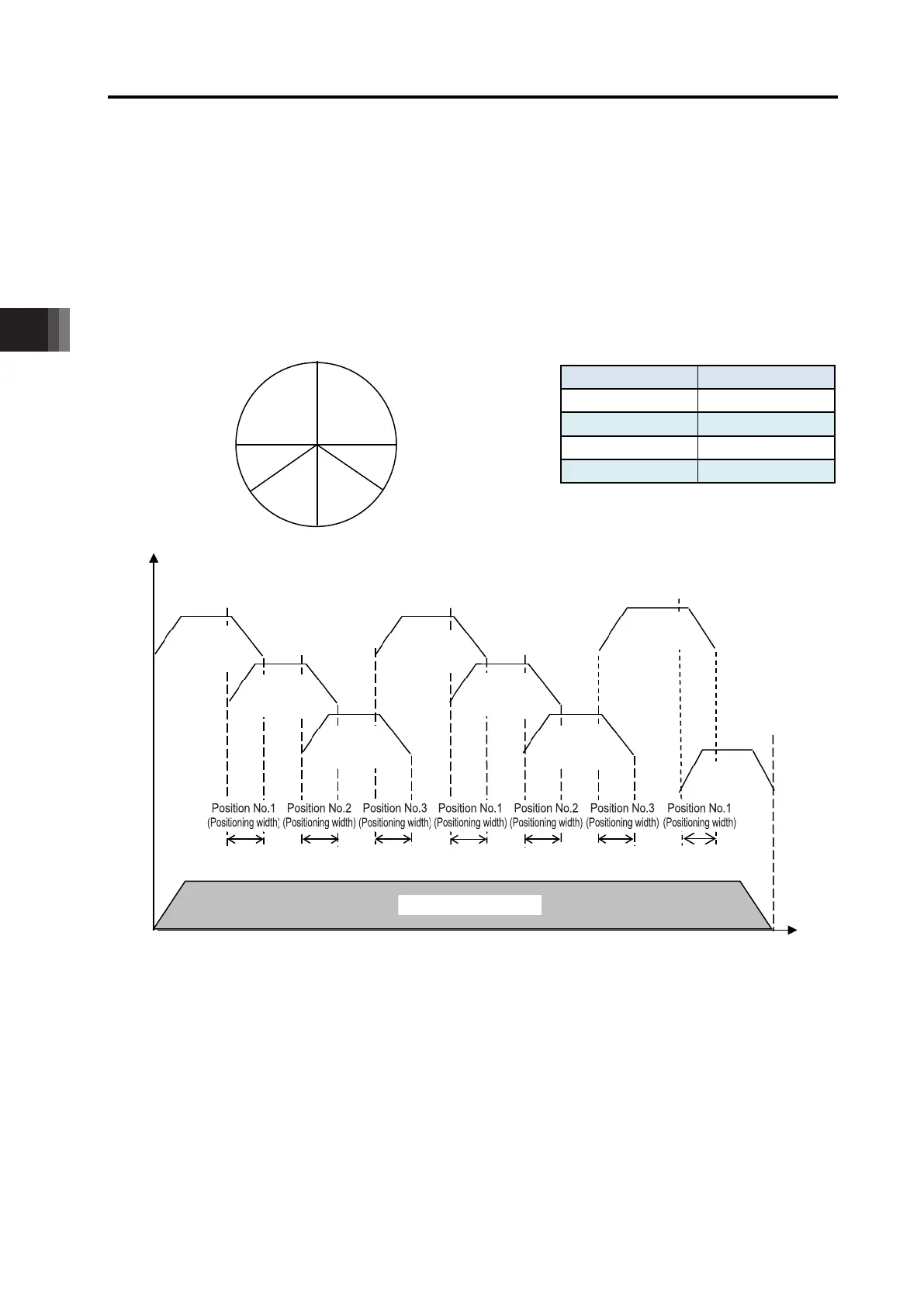
1) Widen the positioning widths of position No.1 to 3 so that they are located before the position at
which deceleration is started.
2) Positioning of position No.1 makes positioning complete signal PEND turned ON before
deceleration is started.
If PEND is turned ON, positioning of position No.2 is executed. Similarly, positioning is repeated
in the order of position No.3 → 1 → 2 → 3 → 4. Because the normal positioning always gives
position data specified last the highest priority, the actuator can be rotated continuously.
3) If the speeds in position No.1 to 4 are set to be the same, the actuator can be rotated at the
same speed. Then the actuator is stopped at the positioning set in position No.4. The number of
rotations is defined by the number of repeats of position No.1 to 3.
Positioning
Positioning
Positioning
Positioning
Positioning
Positioning
Positioning
Positioning

 Loading...
Loading...






