4. Operation
4.2 Operation in Positioner Mode
4-64 ME0342-4B
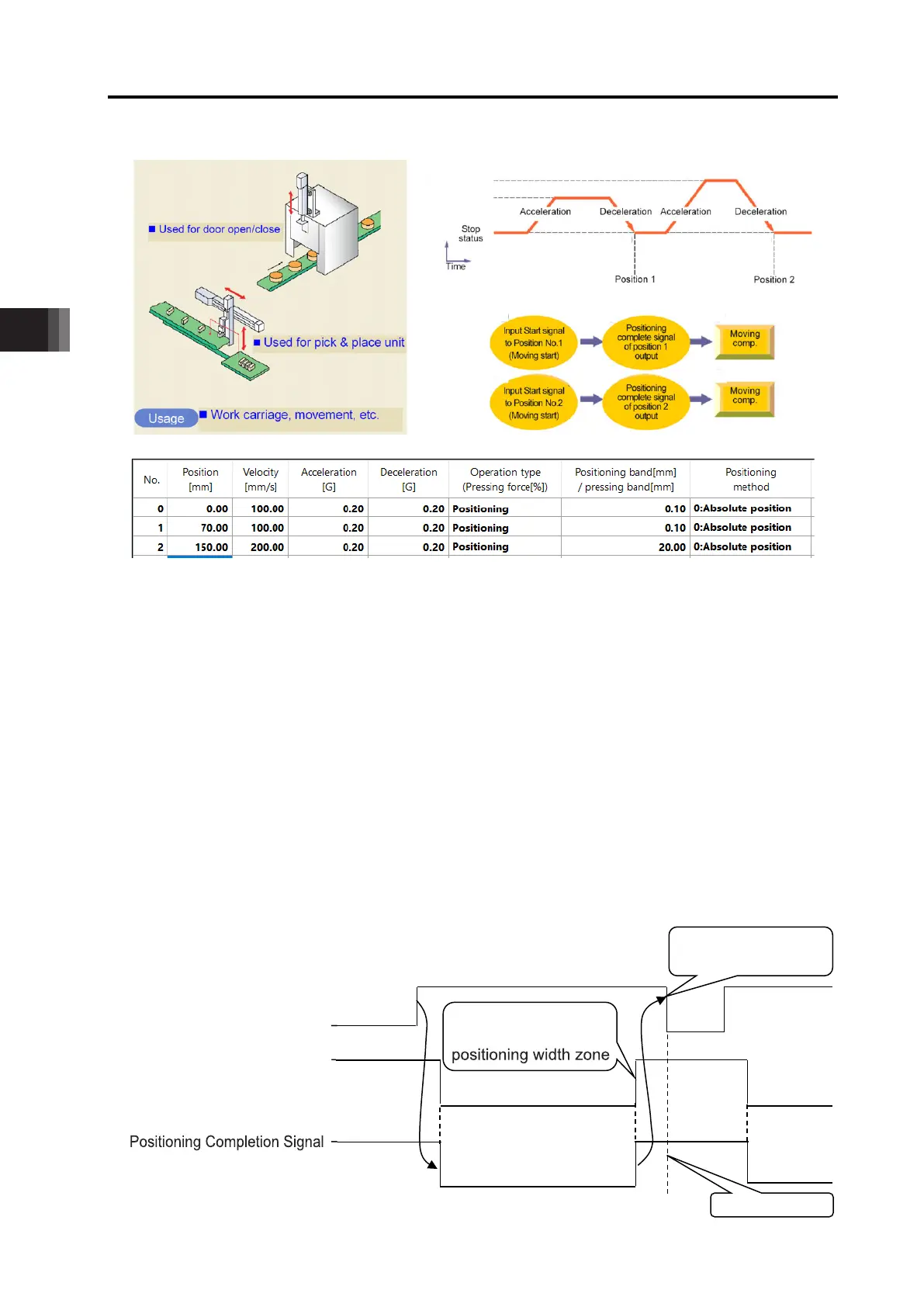
■ Sample use
■ Control method
1) When start signal ST* is turned ON, the actuator starts acceleration based on the data in the
specified position table for positioning to the target position.
2) At the completion of positioning, positioning complete signal PEND is turned ON as well as
current position No. PE* of the specified position.
3) After PEND is turned ON, turn the ST* signal OFF.
4) Current position No. PE* and positioning completion signal PEND are turned ON if the
remaining moving distance is entered into the positioning width zone. The current position
number PE* and PEND Signal will be kept ON once it is turned ON unless the start signal
ST* is turned back ON, servo is turned OFF or the actuator is out of the positioning band
width range. When the pause signal *STP is turned OFF in this condition, the current position
number PE* and PEND Signal will also be turned OFF.
ST*
(PLC→Controller)
PEND
(Controller→PLC)
entering into
PE*
→
turning PEND ON

 Loading...
Loading...






