4. Operation
4.2 Operation in Positioner Mode
4-70
ME0342-4B
Caution
● The speed during pressing operation is set in Parameter No.34. Refer to [9.4 List of
Specifications of Connectable Actuators] for the pressing operation speed.
Do not set any value larger than the value in the list. If the speed set in the position table
is equal to or less than the pressing speed, the pressing is performed at the setup speed.
● The approach start position of pressing should be located at or before the pressing start
position (coordinate 100mm or less in the above example) If not, the moving direction
varies depending on the start position to be dangerous.
For example, pressing at coordinate larger than the pressing end position (larger than
150mm) changes to the tension operation from the current position to the pressing end
position. Note that the pressing operation after positioning to the position of 100mm
does not take place.
● A pressing operation command from a coordinate above the pressing termination
position (150mm or more) should not be performed when the force sensor is used.
● The work is pressed after the pressing is completed. The work may moves backward or
forward. If the actuator is moved backward before the approach position, alarm 0DC
“Pressing motion range over error” occurs to stop the actuator. In movement of the work
in the pressing direction, PEND is turned OFF if the load current becomes lower than
the current limit (pressing [%]). Miss-pressing occurs when the actuator moves by the
pressing moving distance set in “Positioning width”.
● Do not make control of changing to pressing on the way of normal positioning (before
PEND turning ON). Depending on the position at which start signal CSTR is turned ON, the
pressing is performed improperly. Then the PLC cannot manage the position of the actuator.
●
Pressing control cannot be performed with the rotary actuator. If the index mode is selected for
the
rotary
actuator of multi-rotation specification, pressing operation cannot be set. The
positioning complete
signal
PEND is turned ON when the actuator reaches the positioning width.
●
If the actuator gets pressed to the work during the approach operation, error would be issued.
Pressing start position
100mm
Pressing end position
100 + 50 = 150mm
4.2 Operation in Positioner Mode
ME0342-4B 4-71
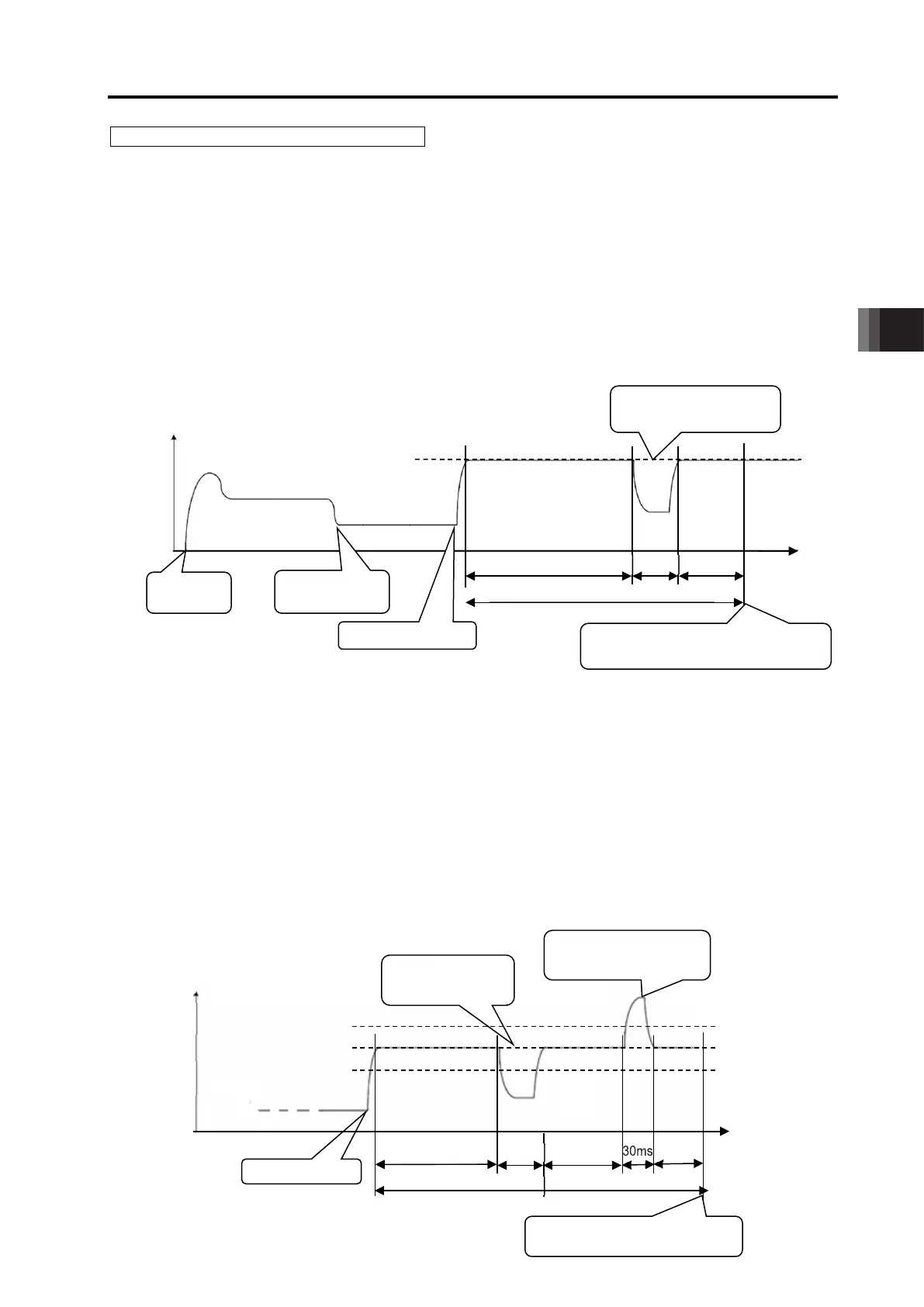
Judging completion of pressing operation
(1) For Standard (PIO Pattern 4)
The operation monitors the torque (current limit value) in percent [%] in “Pressing” of the
position table and turns pressing complete signal PEND ON when the load current satisfies the
condition shown below during pressing. PEND is turned ON at satisfaction of the condition if the
work is not stopped.
(Accumulated time in which current reaches pressing value [%])
– (accumulated time in which current is less than pressing value [%])
≥ 255 ms (Parameter No.6)
Note 1: Some models of the gripper type should be set at 70ms for the default.
(2) For Force Sensor Used Pressing (PIO Pattern 7)
The pressing complete signal PEND should turn on when the pressing force during a pressing
operation satisfies the following condition against the percent [%] of the pressing force set in
"Pressing" in the position table. PEND should turn on once the condition is satisfied even if the
actuator is not stopped.
● Condition
(Accumulated Time of Pressing Force being in Range of Force Judgment Margin Positive and Negative)
≥ 255ms (Pattern No.6)
Pressing start
200ms + 75ms – 20ms ≥ 255ms
(Note 1)
Pressing complete (PEND output)
to movement of work
(150+135+50) - (50+30) ≥ 255ms
Pressing complete (PEND output)
due to workpiece being
Negative [%]
Force Judgment Margin
Positive [%]
Force
pressing force to

 Loading...
Loading...







