4. Operation
4.2 Operation in Positioner Mode
4-94
ME0342-4B
1) In this example, the speed is changed while the actuator moves from the position of 150mm
to the position of 0mm. At first, set the positioning to the target position at the first speed in
position No.1. In the positioning width, set the distance from the speed change position to the
target position. The value is set to 100mm in the example. Thus, for position No.1, position
sensing signal LS1 is turned ON at the position before the target position by 100mm.
2) Set the positioning to the target position at the second speed in position No.0.
3) And then, after starting up Position No. 0 (ST0 Signal) with the position detection output
signal LS1 in Position No. 1 by starting up Position No. 1 (ST1 Signal), turn OFF ST1 Signal.
The operation switches over to Position No. 0 as soon as ST1 Signal is turned OFF.
In this example, the target positions No.0 and 1 are equal with each other. They may not be the
same. However, setting the target positions to be equal with each other allows the distance from
the speed change position to the target position to be known easily.
Depending on the timing when the actuator accepts the input signal, the speed change may be
delayed a little. Changing the positioning width can adjust the timing.
The timing chart shown below indicates that the actuator changes its speed while it moves to
position No.1 after the completion of positioning at position No.2 and moves to position No.0.
4.2 Operation in Positioner Mode
ME0342-4B 4-95
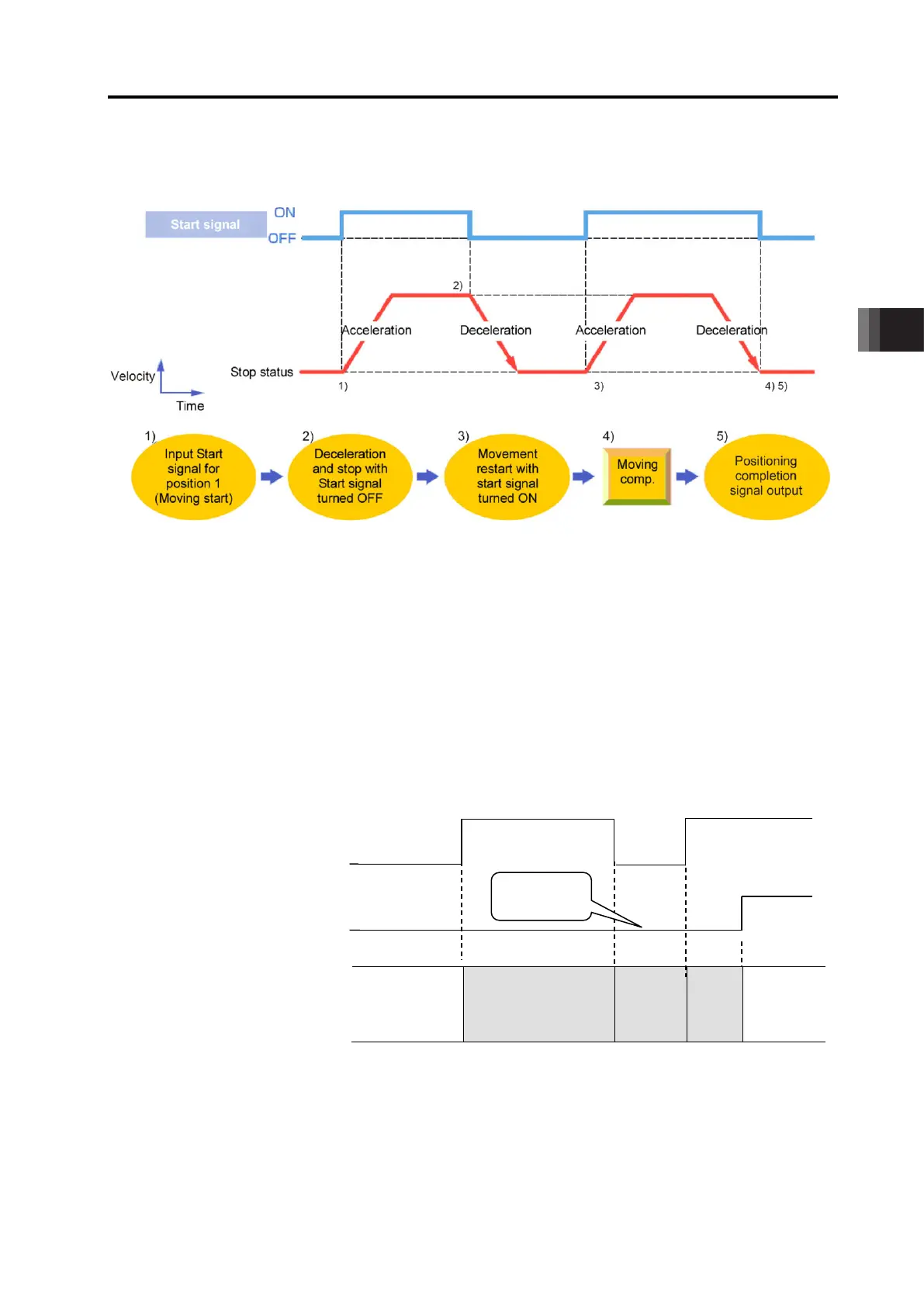
[5] Pause and Operation Interruption (ST*, RES, LS*)
Turning start signal ST* OFF allows the actuator to be paused while it is moved. To restart it,
turn the same ST* signal ON.
■ Control method
If start signal ST* is turned OFF during movement, the actuator can be paused.
Use the control method for interlock in case where an object is invaded into the moving direction
of the actuator being moved.
1) If the ST* signal is turned OFF during movement, the actuator is decelerated to a stop. The
deceleration is the value set in the position table.
2) If the ST* signal is turned ON again, the remaining movement is continued. The acceleration
is the value set in the position table.
Positioning
complete
Operation
Temp.
stop
Cont.
Op.
Position
complete
ST*
(PLC→Controller)
LS*
(Controller→PLC)

 Loading...
Loading...






