5. Various Functions
5.2 Power-saving function
5-5 ME0342-4B
5.2 Power-saving function
5.2.1 AUTO Servo OFF and Full Servo Function
Equipped with AUTO servo OFF (setting available for all motor specifications) and full servo
function (stepper motor specification only) to reduce power consumption while the actuator is
stopped. Fully understand the descriptions in this section and use without any safety or
operational issues.
With automatic servo OFF function, the servo turns OFF automatically after a certain period of
time once positioning is completed. Once the next positioning start signal CSTR is commanded,
the servo automatically turns ON and executes positioning operation. Since holding current
does not flow during the stop, power consumption can be reduced.
Three types of setting are available for the period of time from positioning complete to servo
OF F.
With the full servo function, the power consumption can be reduced by servo-controlling the
stepper motor with a relatively large stop current.
To stop the stepper motor completely with minimal vibration, a current is constantly supplied.
Also, when the value of the encoder deviates from the target position by ±4 counts, it will not be
returned to the target position. However, activating the full servo function will enable returning
even with the deviation of 1 count.
As with the full servo function, the RCP6 Series performs home return even with deviation of 1
count. Therefore, the full servo function cannot be used for RCP6.
With the power-saving function, the status of the actuator determines which is to be enabled:
the setting of Parameter No. 53 “Default stop mode”, or "stop mode" in the position table. The
details are as described below.
Status Setting
Home return complete and on stand-by
(positioning to the target position not
performed)
Execution of power-saving function at the value
set for Parameter No. 53
(Stop mode setting of position No. disabled)
After turning the power ON, stand-by state
with servo ON (positioning to the target
position not performed)
Execution of power-saving function at the value
set for Parameter No. 53
(Stop mode setting of position No. disabled)
Positioning complete in the target position
set in the position table
Execution of power-saving function at the value
set for "stop mode" of each position No.
(Set value of Parameter No. 53 disabled)
5.2 Power-saving function
ME0342-4B 5-6
Caution
● Do not use this function if operation after automatic servo OFF is pitch feed (relative
travel).
● Slight position deviation may occur due to turning the servo ON/OFF. Additionally, if the
position deviates due to application of external force during servo OFF, positioning to
the correct position will become impossible since the position at startup is the reference
point for pitch feed operation.
● Automatic servo OFF function is disabled for push-motion operation. Do not use it. This
function will be enabled upon completion of positioning operation. For push-motion
operation, it will be enabled only when contactless (completion of operation without
contact = same status as positioning complete).
● There is no holding torque during AUTO servo OFF. The actuator will move if external
force is applied. Take extra care regarding interference and safety when setting.
● If jog or inching operation is performed while operating with full servo function, full
servo function will be disabled. Full servo function will be enabled again by moving to
the position No. for which full servo function is enabled.
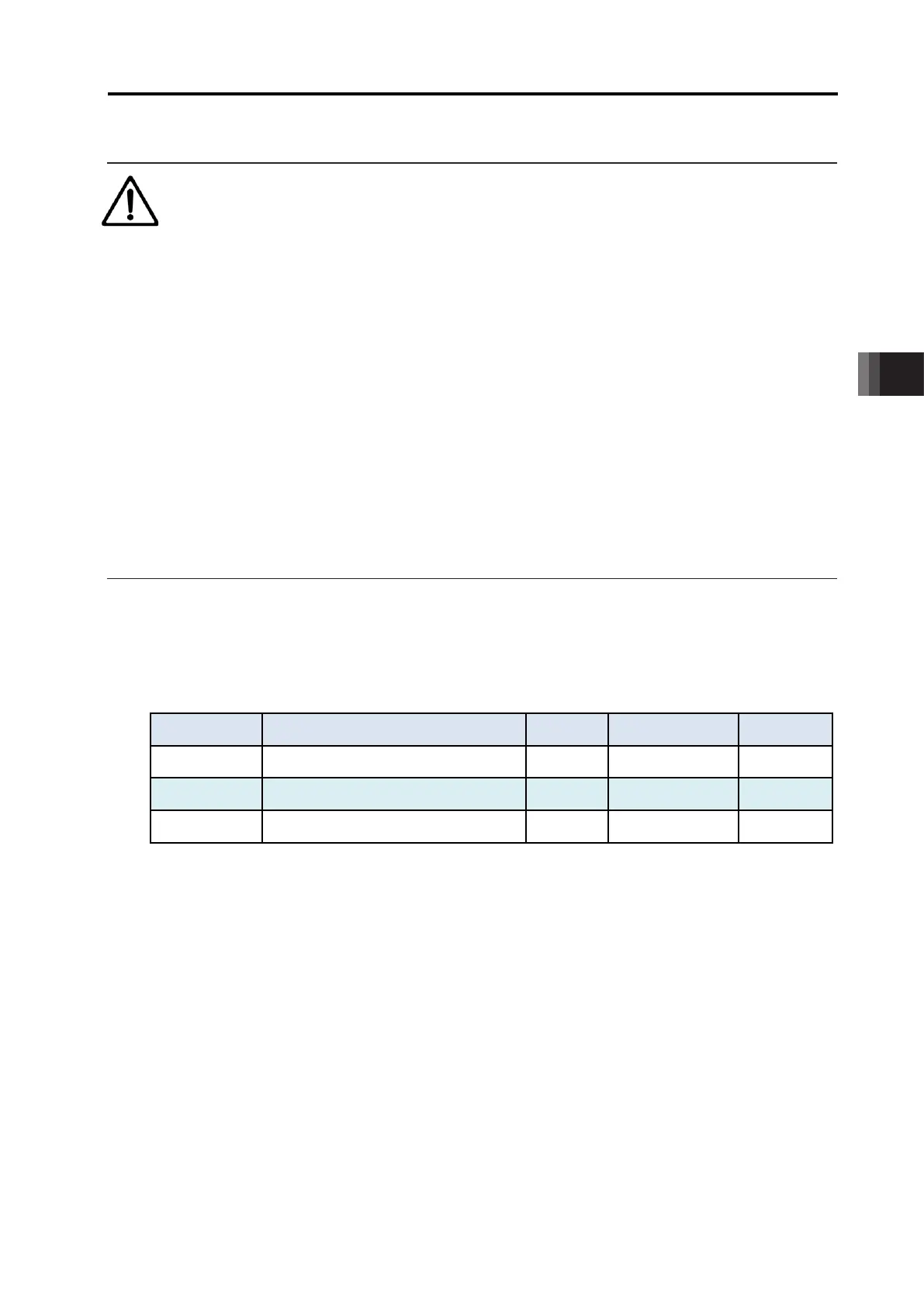
[1] Setting Time until Automatic Servo OFF
Three types of setting are available for delay time from positioning complete until servo OFF.
Set in the following parameters in units of second [s].
Parameter No.
Name Unit Input range
Initial value
36 Automatic servo OFF delay time 1 s 0 ~ 9,999 0
37 Automatic servo OFF delay time 2 s 0 ~ 9,999 0
38 Automatic servo OFF delay time 3 s 0 ~ 9,999 0

 Loading...
Loading...






