3. Wiring
3.1 Positioner Mode (PIO Control)
3-5
ME0342-4B
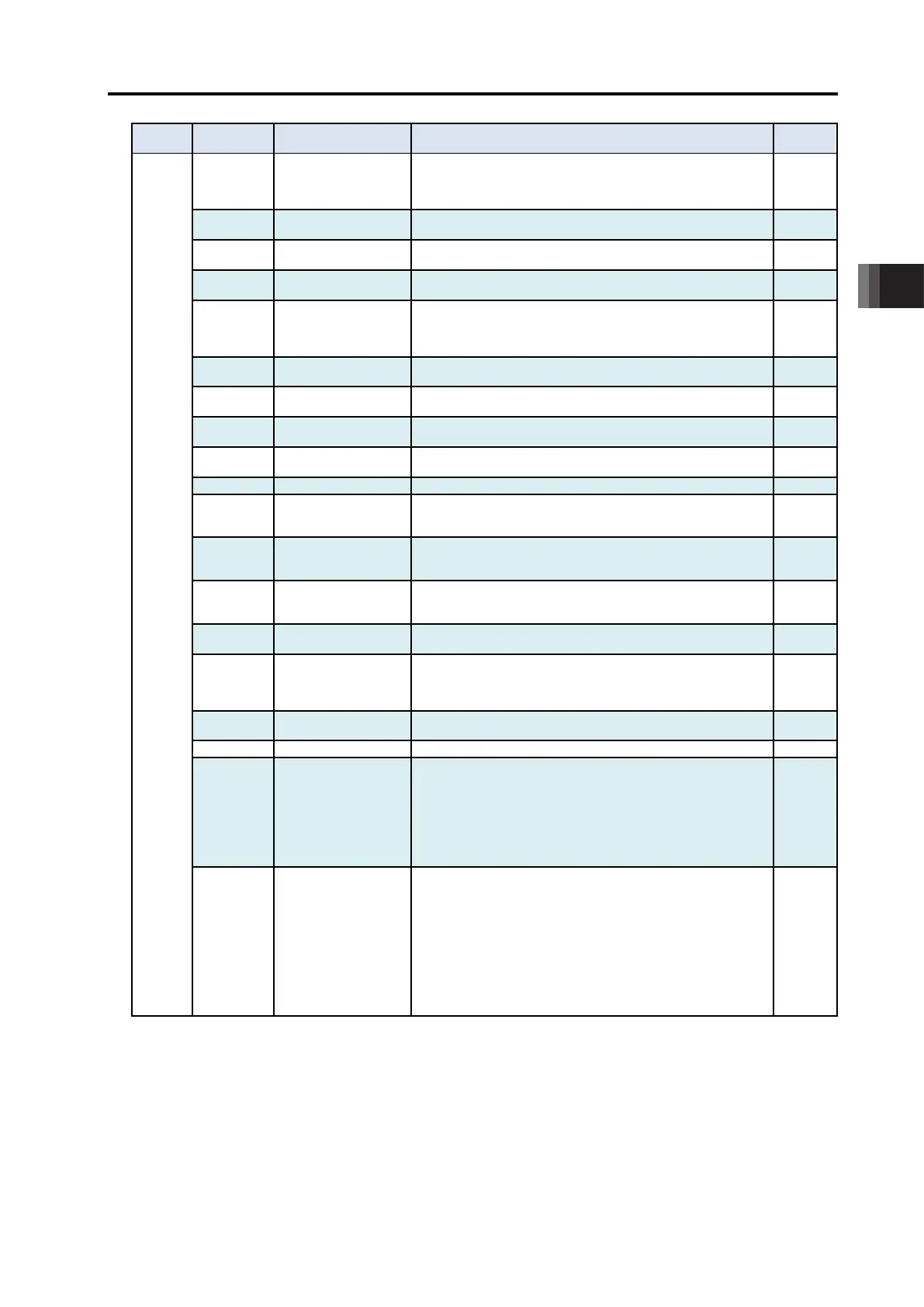
[2] List of PIO Signals
The table below lists the functions of each PIO signals.
Refer to the section shown in Relevant Sections for the details of the control of each signal.
Category
Signal Name Function Description
PTP strobe
(Start signal)
The actuator will start to move to the position set by the
command position number.
Input (in binary) a number of the position that is desired to move.
The brake will forcibly be released.
RMOD
Operation mode
changeover
The operating mode is selectable when the MODE switch of the
controller is set to AUTO.
(The setting is AUTO when signal is OFF, and MANU when ON.)
When this signal turns OFF while the actuator is moving, the
actuator will decelerate to stop. The remaining movement is in a
hold while the actuator is stopped and will resume when the
An alarm will be reset when this signal is turned ON. Also, when
it is turned ON in the pause mode (*STP is turned OFF), the
remaining movement amount can be cancelled.
4.2.4 [6]
4.2.5 [8]
SON Servo ON
The servo remains ON while this signal is ON, or OFF while this
signal is OFF.
4.2.4 [3]
HOME Home return
The controller will perform home return operation when this
signal is turned ON.
4.2.4 [4]
MODE Teaching mode
The operating mode will change to the teaching mode when this
signal is turned ON. The mode will not be switched over unless
CSTR, JOG+ and JOG- are all OFF and the actuator operation
4.2.5 [7]
JISL Jog/inching selector
Jog Operation can be performed with JOG+ and JOG- while this
signal is O FF.
Inching Operation is performed with JOG+ and JOG- when it is
4.2.5 [7]
JOG +
JOG -
Jog
Jog Operation is performed to positive direction by detecting ON
edge of JOG+ signal and to negative direction by JOG- signal
while JISL signal is OFF.
The actuator will decelerate and stop if OFF edge is detected
while in each Operation.
Inching Operation is performed while JISL signal is ON.
4.2.5 [7]
PWRT Current Position Write
When the write position is specified in the teaching mode and
this signal has remained ON for 26ms or longer, the controller
will write the current position in the specified position field.
Loadcell Calibration
Command
Turn this signal on for 20ms or more and calibration of the
loadcell should be performed.
4.2.8 [2]
ST0 to ST6 Start Signal
The actuator moves to the commanded position with this signal
ON during the solenoid valve mode.
4.2.6 [1]
Note 1 The PIO patterns assigned with CLBR should be dedicated for PCON-CBP/CGBP types. It cannot be used in
PCON-CB/CGB/CFB/CGFB.
3.1 Positioner Mode (PIO Control)
ME0342-4B 3-6
Category
Signal Name Function Description
Output
PEND/INP Position complete
Turns ON in the positioning band range after actuator operation.
The INP signal will turn OFF if the position
in-position range. PEND and INP can be switched over by the
4.2.4 [3]
4.2.4 [4]
4.2.5 [1]
The position No. reached after the positioning completion, is
output (binary output).
4.2.5 [1]
HEND Home return completion
This signal will turn ON when home return has been completed.
It will be kept ON unless the home position is lost.
4.2.4 [4]
Zone
Turns ON if the current actuator position is within the range set
to the parameter.
4.2.4 [5]
PZONE Position zone
This signal will turn ON when the current actuator position enters
the range specified the position data after position movement.
Even though it can be used together with ZONE1, PZONE will
become only available for operation by the set position number.
4.2.4 [5]
RMDS
Operation Mode Status
Output
Outputs the operation mode status. It turns on when the
controller is on Manual Mode.
4.2.4 [2]
*ALM Alarm
Turns ON when the controller is in normal condition, and turns
OFF when an alarm is generated.
4.2.4 [6]
Alarm Code
The detail of the alarm is output with binary code when an alarm
more than the operation cancel level is issued.
4.2.4 [7]
MOVE Moving
Turns ON during the actuator is moving (including home-return
operation and pressing operation).
This signal will remain ON while the servo is ON.
*EMGS Emergency Stop Output
This signal remains ON while the controller is under the
emergency stop reset condition and turns OFF when the
emergency stop condition is enabled. (Regardless of alarms.)
4.2.4 [1]
MODES Teaching Mode Output
This signal will turn ON while the teaching mode is enabled by
the input of the mode signal and will turn OFF when the mode
changes to the normal mode.
4.2.5 [7]
WEND Writing Complete
It is OFF during the teaching mode and turns ON when the
writing by PWRT Signal is complete. It turns OFF when PWRT
4.2.5 [7]
PE0 to PE6
In the solenoid valve mode, this signal will turn ON when the
actuator completes moving to the target position.
4.2.6 [1]
LS0 to LS2 Limit Switch Output
Turns ON when the current actuator position is within the range
of positioning band (±) of the target position. It is output even
before the movement command and the servo is OFF if the
home-return operation is completed.
4.2.7 [2]
CEND
(Note 1)
Loadcell Calibration
Complete
It turns on once the loadcell calibration is complete.
Turn CLBR Signal off and this signal also turns off.
4.2.8 [2]
Outputs when a message level alarm is generated
(Note 2)
.
LOAD
(Note 3)
Load output judgment
status
It turns ON when the pressing current exceeds the current set in
“Threshold” in the position data for a certain period of time
(Note 4)
when the actuator in the pressing operation range and also in
the range of “Zone +” and “Zone -“ in the position data.
It should be used in such cases as judgment if press-fitting
operation is conducted in normal condition.
Also, it turns ON when collision is detected (judged) in the
collision detection feature.
4.2.5 [1]
TRQS
(Note 3)
Torque level status
It turns ON when the pressing current exceeds the current set in
“Threshold” in the position data for a certain period of time
(Note 3)
when the actuator in the pressing operation range.
It turns OFF if the current falls below “Threshold”.
It should be used in such cases as judgment if press-fitting
operation is conducted in normal condition.
It turns ON when the actuator hits an obstacle or the stroke end
and become unable to move during movement to the positive
direction with JOG+ before performing the home-
and the current of the motor exceeds the home-return current
limit value in Solenoid Valve Mode 2.
4.2.5 [1]
Signal with “*” expresses the signal of active low. It is ON when the power is applied to the controller, and turns OFF when the
signal is output.
(Note 1) The PIO patterns assigned with CEND should be dedicated for PCON-CBP/CGBP types. It cannot be used in
PCON-CB/CGB/CFB/CGFB.
(Mote 2) It should be set in Parameter No. 156. Refer to [6.1 [95]]
(Note 3) This signal is dedicated for High-Thrust Actuator (CFB type) only. Use this as a reference output for other actuators.
LOAD Signal and TRQS Signal are able to switch in Parameter No. 51. Refer to [6.1 [40]]
(Note 4) It should be set in Parameter No. 50. Refer to [6.1 [39]]

 Loading...
Loading...






