U
SER
’
S
M
ANUAL
5-1
5: CPU C
ONFIGURATION
(FUN)
Introduction
This chapter describes setting the FUN (function) table.
FUN1 through FUN11 are used to configure the user program and these settings must be designated before attempting to
transfer the user program to the
MICRO
3
base unit.
FUN20 through FUN28 are used to check the
MICRO
3
base unit status and data.
FUN29 is used to read user communication status to the program loader (
MICRO
3
C
only).
FUN30 through FUN36 are used to set the operation modes of the program loader.
FUN40 through FUN43 are used for the memory card installed in the program loader.
FUN50 is used to monitor user communication data on the program loader (
MICRO
3
C
only).
FUN Settings (FUN1 through FUN11)
Note:
Since FUN1 through FUN11 settings relate to the user program, the user program must be transferred to the
MICRO
3
after changing any of these settings. When the user program is cleared using the DEL, END, and keys, FUN1
through FUN10 settings are also reset to the default values. The FUN11 value is not changed by deleting the entire user
program.
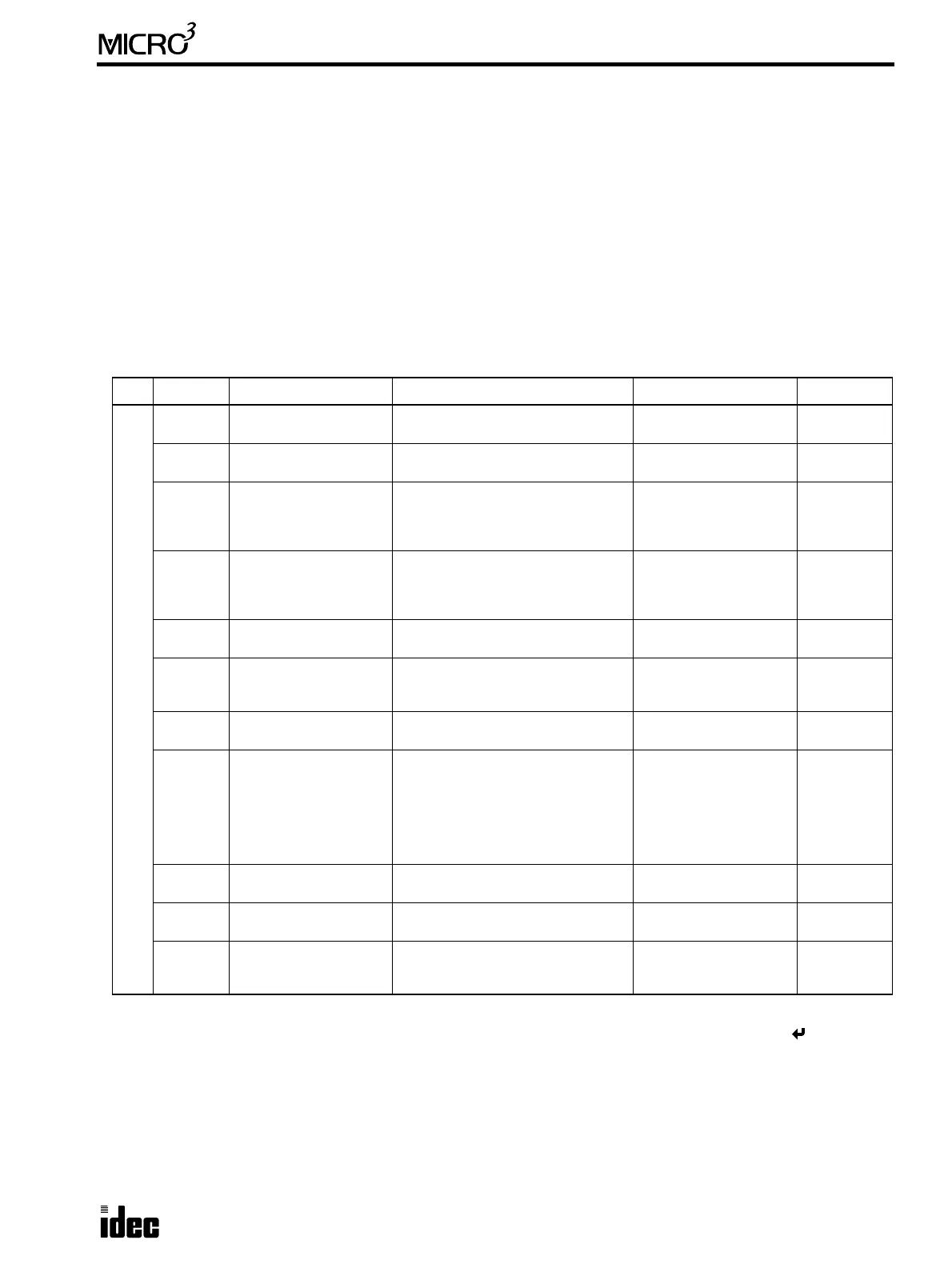
For Number Name Function Option Default
User Program
FUN1
Stop input number
selection
Selects any input terminal as a stop
input.
0 to 15 None
FUN2
Reset input number
selection
Selects any input terminal as a reset
input.
0 to 15 None
FUN3
Internal relay “keep”
designation
Designates a range of internal relays
as keep type.
Standard processing:
0 to 287
High-speed processing:
0 to 47
All clear
types
FUN4
Shift register “keep”
designation
Designates a range of shift register
bits as keep type.
Standard processing:
0 to 63
High-speed processing:
0 to 31
All clear
types
FUN5
Processing mode
selection
Selects standard or high-speed
processing mode.
Standard or high-speed
processing mode
Standard
FUN6
Rising or falling edge
selection for catch
inputs
Selects rising (ON pulse) or falling
edge (OFF pulse) to receive catch
inputs.
Up or down Up
FUN7
Input filter time selec-
tion
Selects the input filter time.
Hard filter: 0 to 255
Soft filter: 0, 3, 7, 10
Hard: 10
Soft: 3
FUN8
Loader port communica-
tion mode setting
Sets the communication format for
MICRO
3
connected to computer or
modem.
Baud rate
Terminator code
Data bits
Parity check
Stop bits
Mode selection input
Receive timeout
9600 bps
0D (CR)
7 bits
Even
1 bit
None
500 msec
FUN9
PLC address for net-
work communication
Sets the communication device num-
ber of MICRO
3
in 1:N computer link.
0 to 31 0
FUN10
Control data register
setting
Enables or disables control data
register function.
Enable or disable All disabled
FUN11
Program capacity and
PLC type selection
Selects the program capacity to write
into the program loader and selects
the PLC type.
Capacity: 244, 500, 1K
PLC: MICRO
3
, MICRO
3
C
1K (initial)
MICRO
3