Kinco FD5P AC series servo driver
册
Chapter7:Tuning of the servo system control
7.5.1 Gain switching method
The drive provide three method for dynamically selecting PI control parameters.
Method 1: Switch PI by digital input:
Configure the function gain switch 0 or/and gain switch 1 at the digital input port,
and the value of the PI pointer is the BCD code composed of the input:
Bit0: Gain switch 0
Bit1: Gain switch 1
Table 7-9 Correspondence between gain switching and PI pointer
Gain switch 0 Effective input level
Gain switch 1 Effective input level
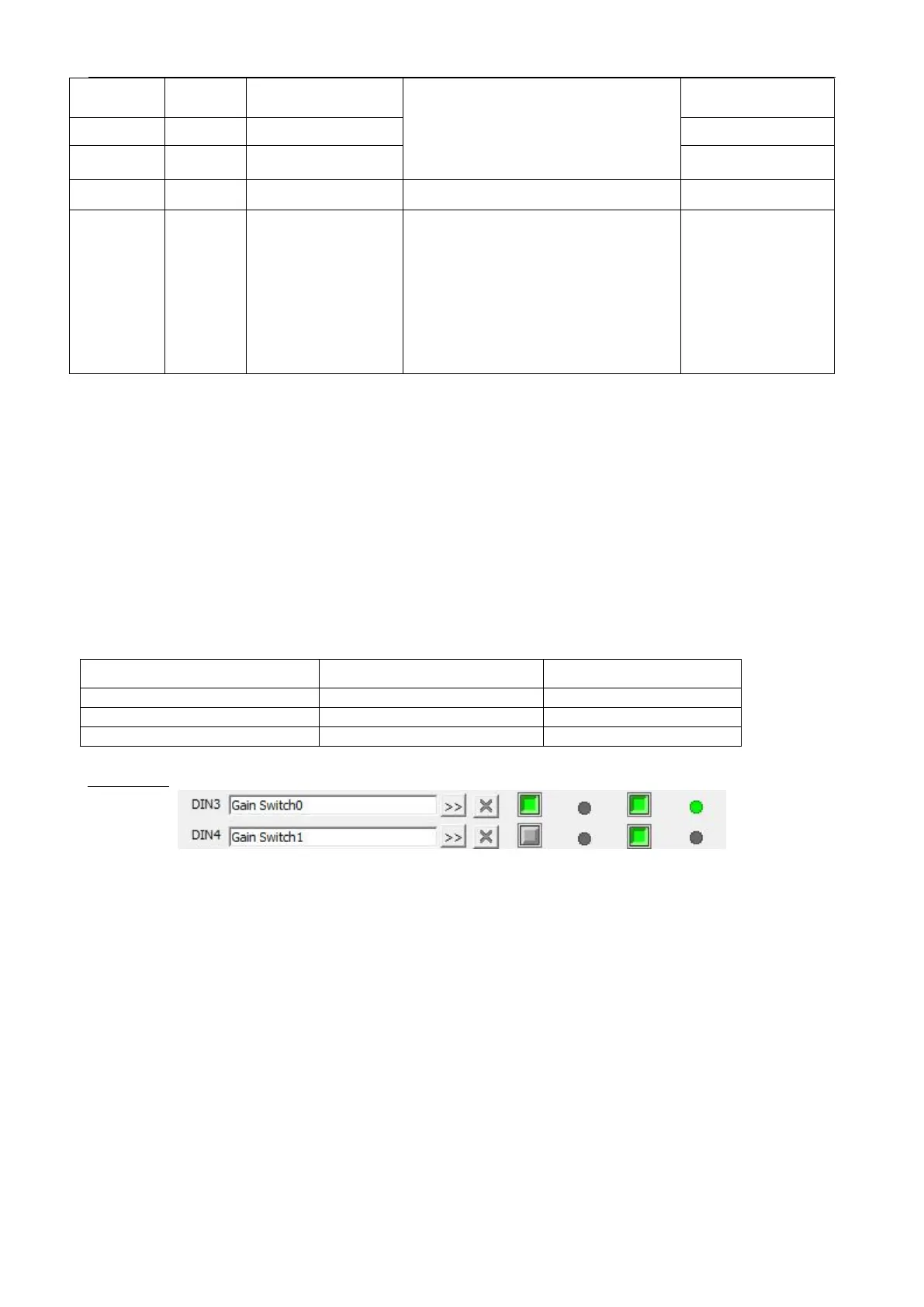
Example:
Figure 7-8 Gain switch definition
Gain switch
0 = 1
,Gain switch
1 = 0
,so
PI
pointer
=1
,Valid PI parameter is Kvp[1], Kvi[1],
Kpp[1]
Method
2
:Drive auto switch
PI
Set auto switch PI(
6069.09
)
= 1
: When the motor is running, the PI pointer is 0; when the motor
is in the position to or the motor zero speed state, the PI pointer is 1.
Some equipment with large inertia may be affected by inertia or elastic force and vibrate when it
decelerates to stop. At this time, switching flexible PI parameters helps to achieve efficient shutdown.
Automatic PI switching is suitable for applications where different PI parameters are required for
these motors in running and stopped states. If the gain switching function is defined on the digital
input port, the automatic gain switching will be invalid.
Gain parameter called when PI pointer is 3
Indicates the PI parameter being called
When the target position/target speed is
reached, that is, when bits.Target_reached=1,
select the PI parameter, which is suitable for the
occasions where different PI parameters need to
be used during the motion process and the static
state:
0: PI pointer(60F9.28)=0;
1: PI pointer (60F9.28)=1;
 Loading...
Loading...

