Kinco FD5P AC series servo driver
册
Chapter 6 Operation modes and control modes
Note
The speed position direction control cannot be modified in the enabled state.
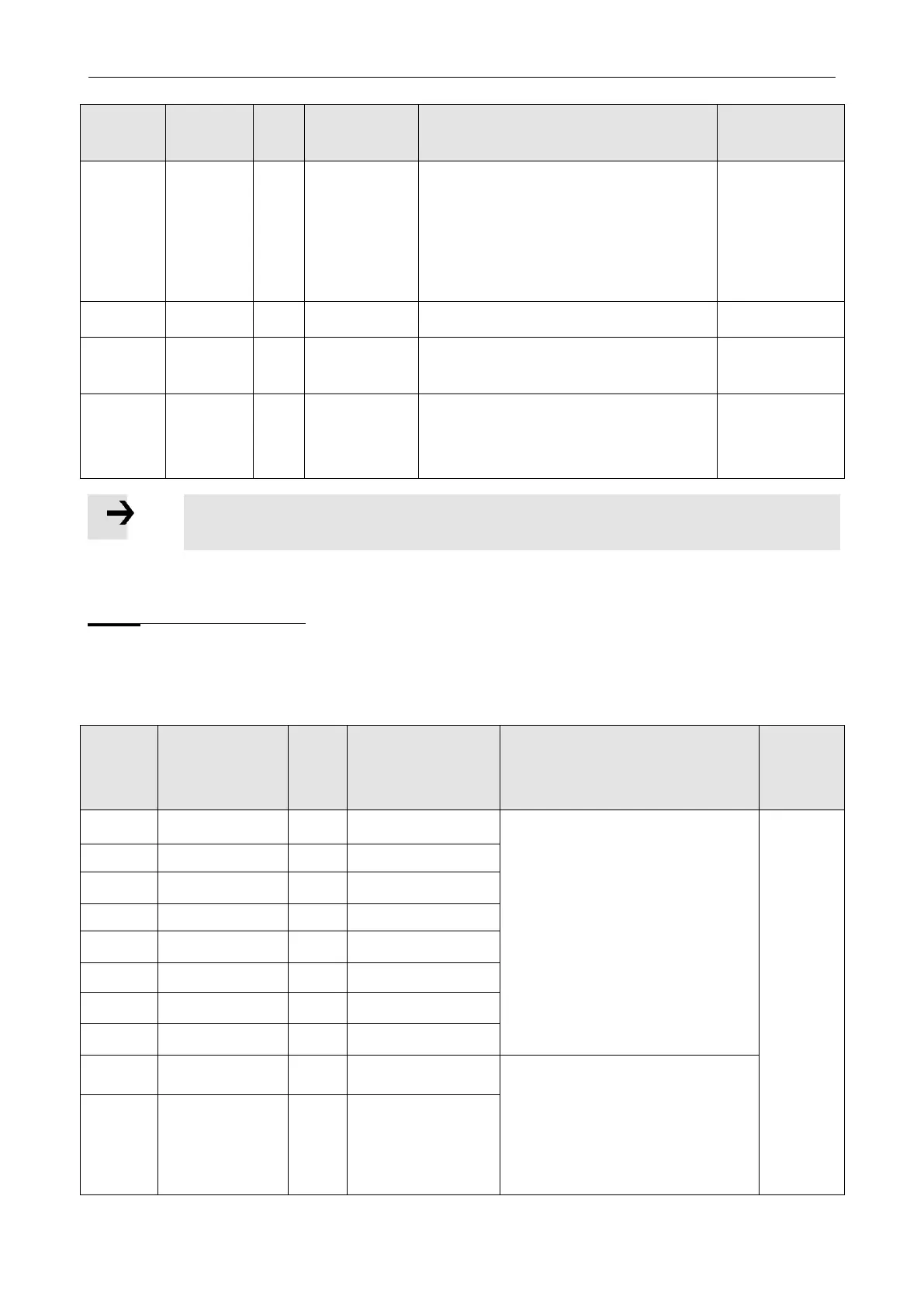
Table 6-7 Description of velocity mode’s parameters
-3: The velocity command is specified
directly by Target_Speed. Only the velocity
control loop is active.
3: The velocity command is specified by
Target_Speed with profile acceleration and
profile deceleration. Velocity- and position
control loops are active.
0x0F Enables the drive
0x06 Loosen the shaft and disable the drive
Speed position
direction control
run polarity reversal
0: Counterclockwise is the positive direction (default
value)
1: Clockwise is the positive direction
6.2.1 DIN Speed mode
The Din_Speed object window in PC software can be accessed from menu item Controller->Control
Modes->DIN Speed Mode.
Table 6-8 DIN Speed mode
The velocity command is specified
via Din_Speed[x].
x is the BCD code of
Bit 0: Din Vel Index0
Bit 1: Din Vel Index1
Bit 2: Din Vel Index2
A bit which is not configured means 0.
When the operation_mode is 3 mode,
the trapezoidal acceleration and
trapezoidal deceleration must be set,
otherwise the response speed
segment will not be executed.
 Loading...
Loading...

