Kinco FD5P AC series servo driver
册
Chapter 8 Alarm Investigation
Chapter 8 Alarm Investigation
Alarm code numbers flash at the panel when the controller generates an alarm.
If you need more detailed information about errors and error history, please connect the
controller to the PCvia RS232 and refer to chapter 5.7.
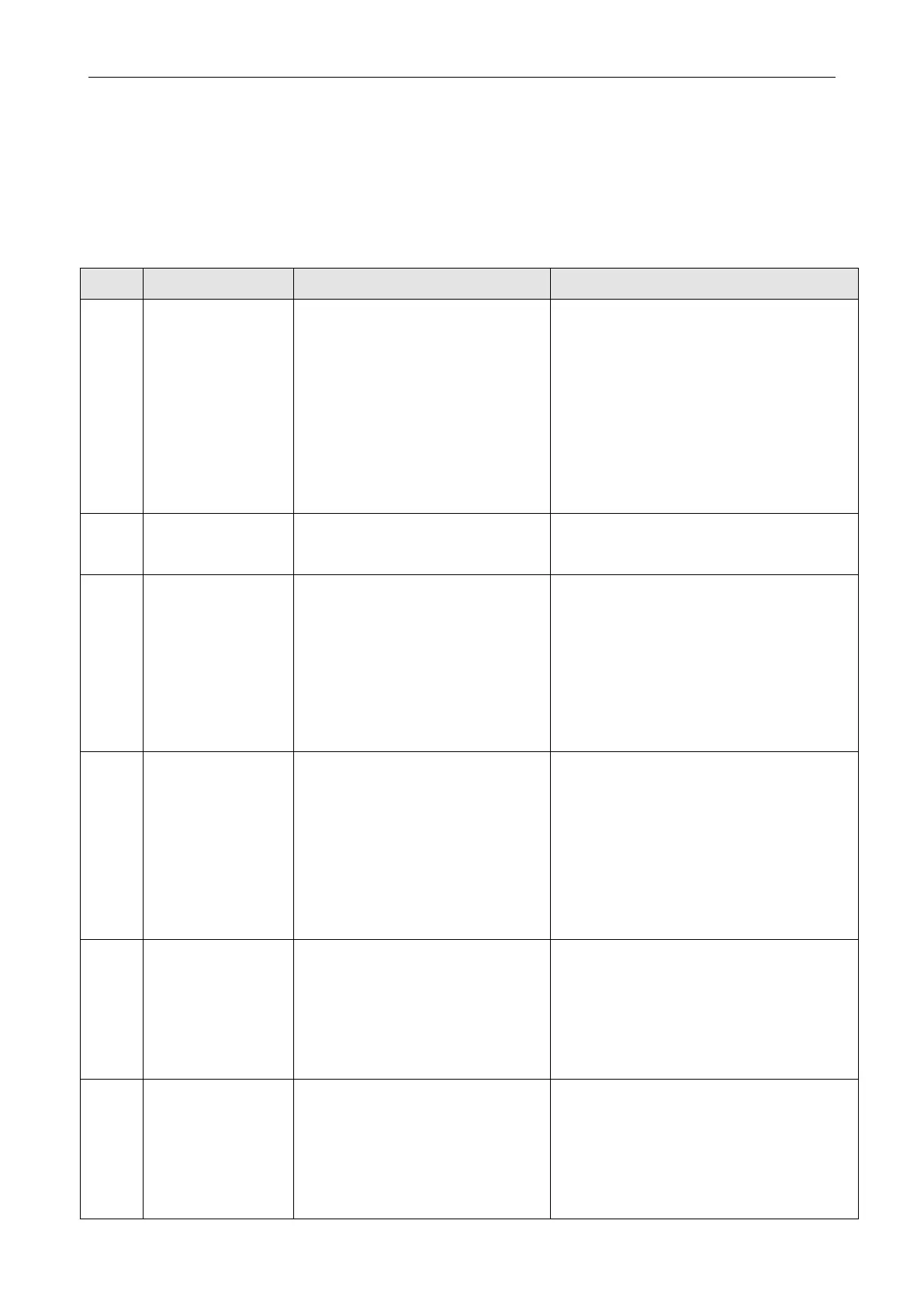
Table 8-1: Alarm codes of Error_State1
1. The driver is not equipped with a motor.
2, the current motor model is different from
the motor model saved by the driver
1, the driver factory parameters do not include
motor configuration, connect the motor encoder
line can automatically identify the motor
parameters.
2. Connect the upper computer software to check
whether the current motor model matches the
motor code on the nameplate; Check that the
current motor model matches the motor code with
panel address EA01. If the current motor model is
different from the actual motor, please refer to
Table 4-2 to self-identify the motor parameters.
Error status word 2 alarm
Press the SET key to enter Error_State2 (d1.16),
read the error bit, check the errormeaning in table
8-2.
Encoder cable error or not connected; The
presence of a 400.0 alarm indicates that the
communication encoder is not responding
Step 1: Make sure that the encoder between the
driver and the motor is properly connected and
the cable is firmly connected.
Step 2: Check whether the current motor model
matches the motor code in the nameplate through
EA01 or the upper computer software. If the
current motor model is different from the actual
motor, please refer to Table 4-2 to self-identify the
motor parameters.
Multi-turn absolute encoder multi-turn data is
invalid, need to reset
Step 1: Press the button to enter d0.07 and
set the data to 10, or modify the
communication encoder data reset
(0x269000) to 10 through the host software.
Step 2: Reset the faulty or restart the drive. If
the error persists, check whether the battery
cable is securely connected, and try to
replace the battery cable or compare the
motor.
Motor model setting error;
Encoder wiring error or external interference
caused;
Step 1: Check whether the current motor code is
consistent with the motor code in the nameplate of the
connected motor through EA01 or the upper computer
software.
Step 2: Make sure that the encoder between the
driver and the motor is properly connected and the
cable is firmly connected.
The temperature of controller’s power
module has reached the alarm value.
Step 1: Check whether the motor and drive
power meet the requirements.
Step 2: Restart the drive and check whether
the cooling fan can be started during the
power-on process. Check that the heat
dissipation hole in the driver housing is
blocked.

 Loading...
Loading...
