Kinco FD5P AC series servo driver
Chapter 3 Installation and wiring
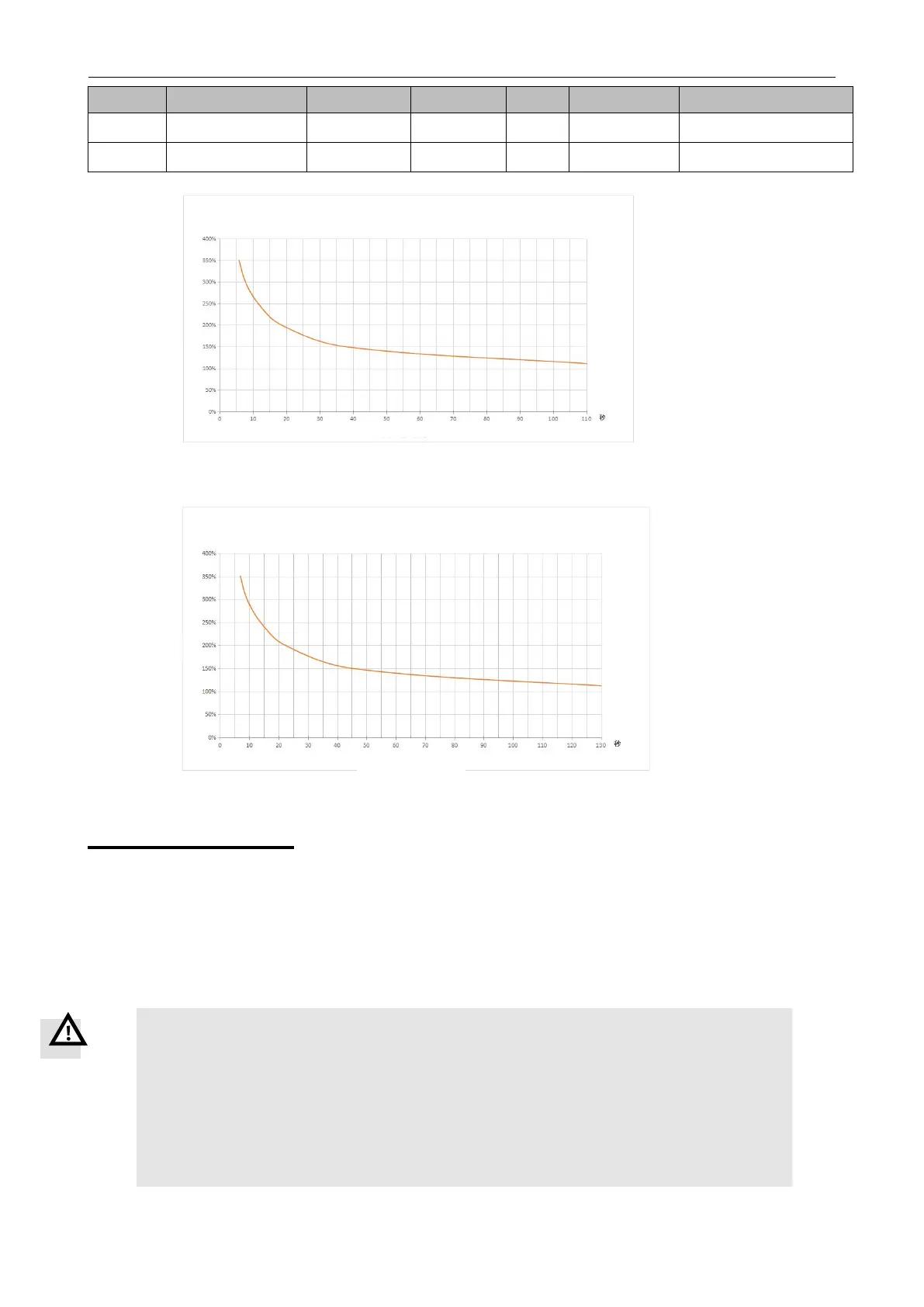
Figure 3-9 400W motor overload characteristic curve
Figure 3-10 750W motor overload characteristic curve
3.2.4 Common DC bus
The braking energy generated during motor operation will be fed back to the drive bus capacitors,
causing the drive bus voltage to rise. Under the condition that the multi-axis control is
asynchronous (part of the motor is electric, part of the motor is braked), the common DC bus can
keep the drive bus voltage more stable and realize the full utilization of energy.
Motor IIT actual
utilization
The actual load rate of
the motor
Actual drive IIT
utilization
The actual load rate of
the drive
Warning!
Only drivers with the same voltage level support common DC busbars. Do not use
380V drivers and 220V drivers with common DC busbars!
Please ensure that the driver charge light is off before connecting the cable;
otherwise, electric shock may occur!
When the DC bus is connected, DC+ and DC- must be connected between the
drivers. Do not connect DC+ to DC-!
Ensure that the cable is connected correctly before powering on the driver.
400W motor overload characteristic
curve
750W motor overload characteristic
curve
 Loading...
Loading...

