Kinco FD5P AC series servo driver
册
Chapter 6 Operation modes and control modes
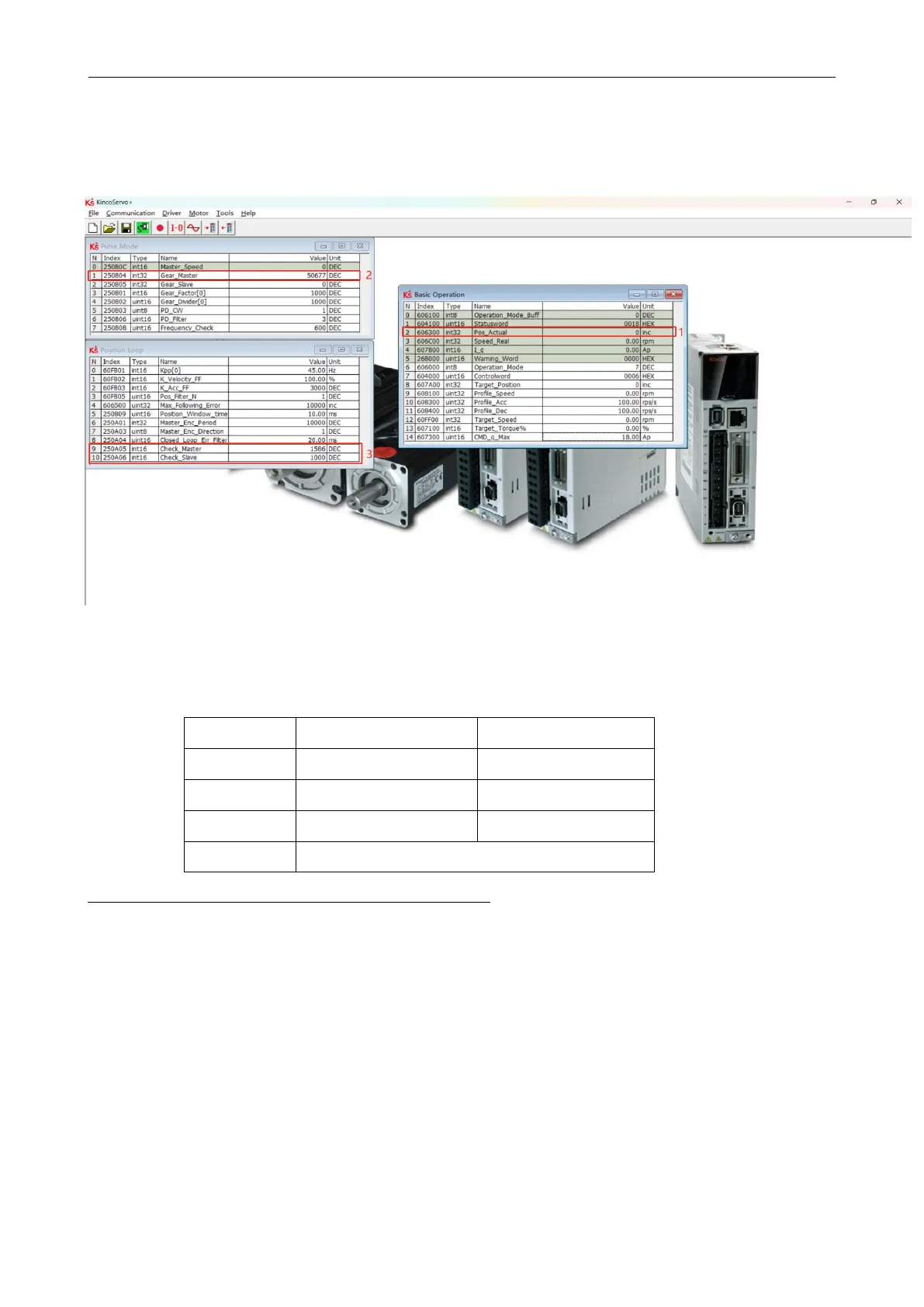
then observe the gear front pulse data and the actual position, and confirm the ratio according to
the difference between the two positions.As shown in the table below, according to the final
results, the full closed-loop spindle check =1586 and the full closed-loop slave shaft check =1000
are calculated.
Figure 6-14 Fully closed-loop master-slave axis check settings
Table 6-21 Master and slave axis check calculation method
Step 6:Set up full closed-loop proportional detection
The operating speed of the full closed-loop main encoder and motor fluctuates within the range,
and the default value is 2.34%. If the flexible connection of the master and slave shafts slips
seriously, the proportion can be increased appropriately.
6.7
Homing mode
(6)
or some applications, the system needs to start from the same position every time after power
on. In the homing mode, the user can specify the system’s home position and a zero (starting)
position.
Click menu item Controller->Control Modes->Homing definition, and the following window
appears:
The actual position of motor

 Loading...
Loading...
