Kinco FD5P AC series servo driver
册
Chapter 6 Operation modes and control modes
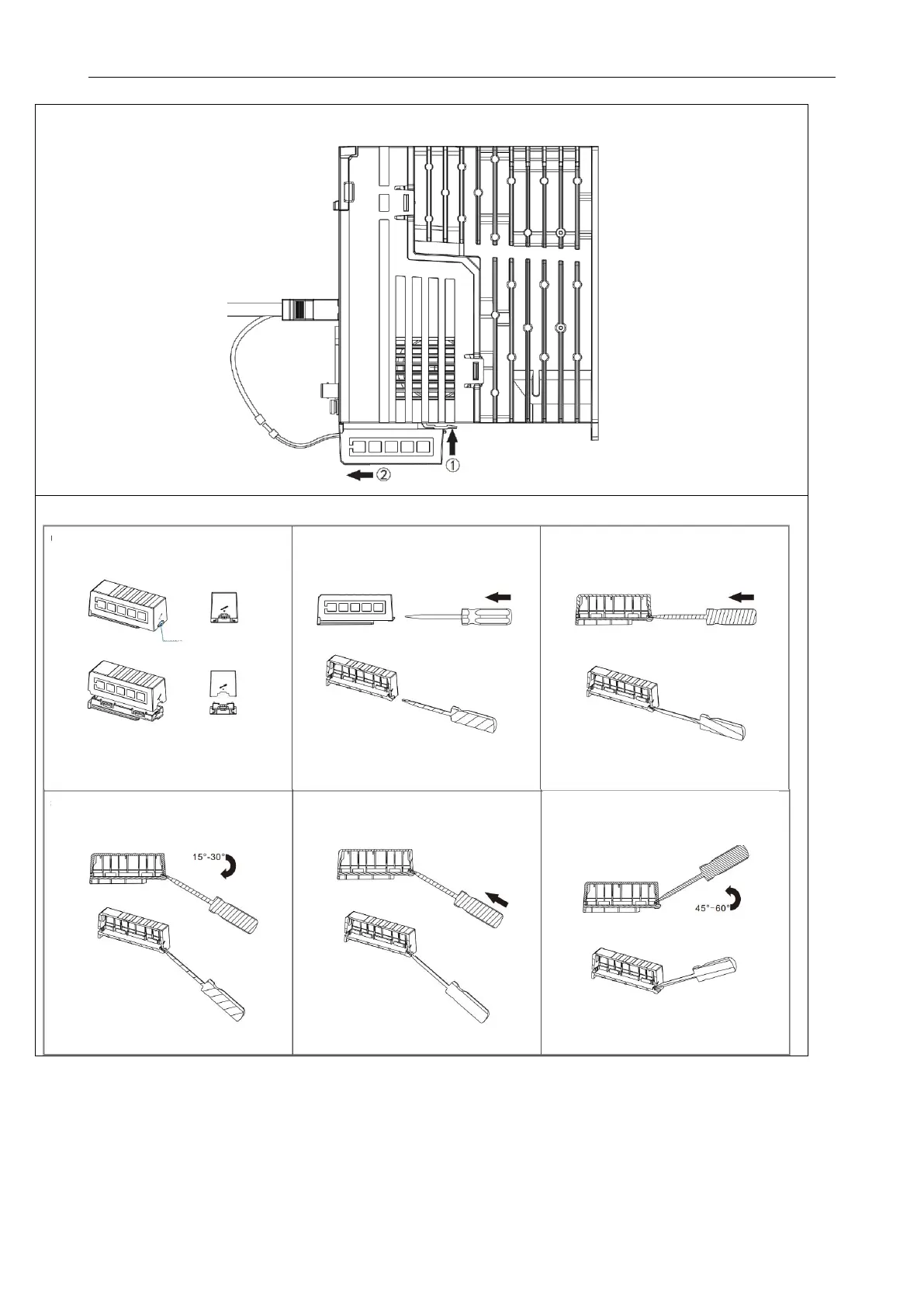
2)To remove the battery case from the bottom of the drive, first press the buckle and then remove the battery
3)To replace the battery, remove the cover by performing the following steps.
6.8.4.1 Multi-turn motor power-on configuration
When the absolute encoder motor is connected to the driver for the first time, the driver will appear
000.4 encoder UVW fault or communication fault alarm, which can be cleared by resetting the status
marker of the encoder.
Battery box removal
(Remove a flat-head screwdriver)
1.Insert the screwdriver horizontally to the left from
one side into the removal square hole
2.Insert a screwdriver into the square hole until it
cannot move
3.Continue to insert the screwdriver in the direction
of the battery box and turn it 15-30 degrees in the
direction of the arrow
4.The screwdriver continues to move until it
reaches the step
5.Remove and open the battery box by turning the
screwdriver 45 to 60 degrees in the direction of the
arrow

 Loading...
Loading...
