Kinco FD5P AC series servo driver
册
Chapter 6 Operation modes and control modes
Figure 6-9 Master slave wiring
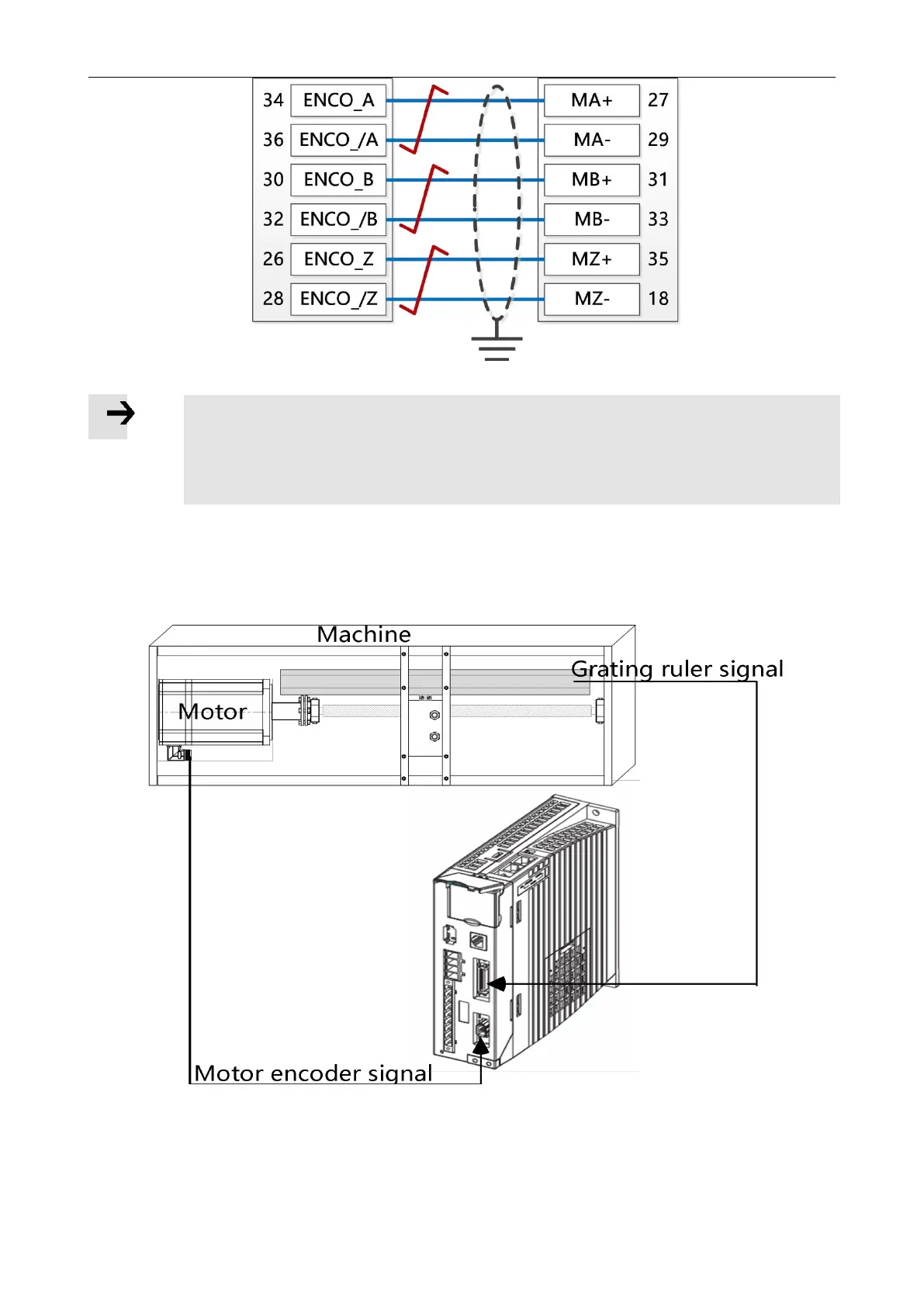
6.6 Full closed loop mode
The servo drive is connected to the encoder/grating ruler feedback signal at the mechanical end for
more accurate closed-loop control, which avoids positioning errors due to the mechanical system.
Figure 6-10 Full Closed Loop Application Case
Note
Forward rotation means positive position counting, the default is CCW direction,
you can set the speed position direction control (607E.00) = 1, change the rotation
direction of the motor shaft
 Loading...
Loading...

