Kinco FD5P AC series servo driver
册
Chapter 6 Operation modes and control modes
6.5.2 Other function
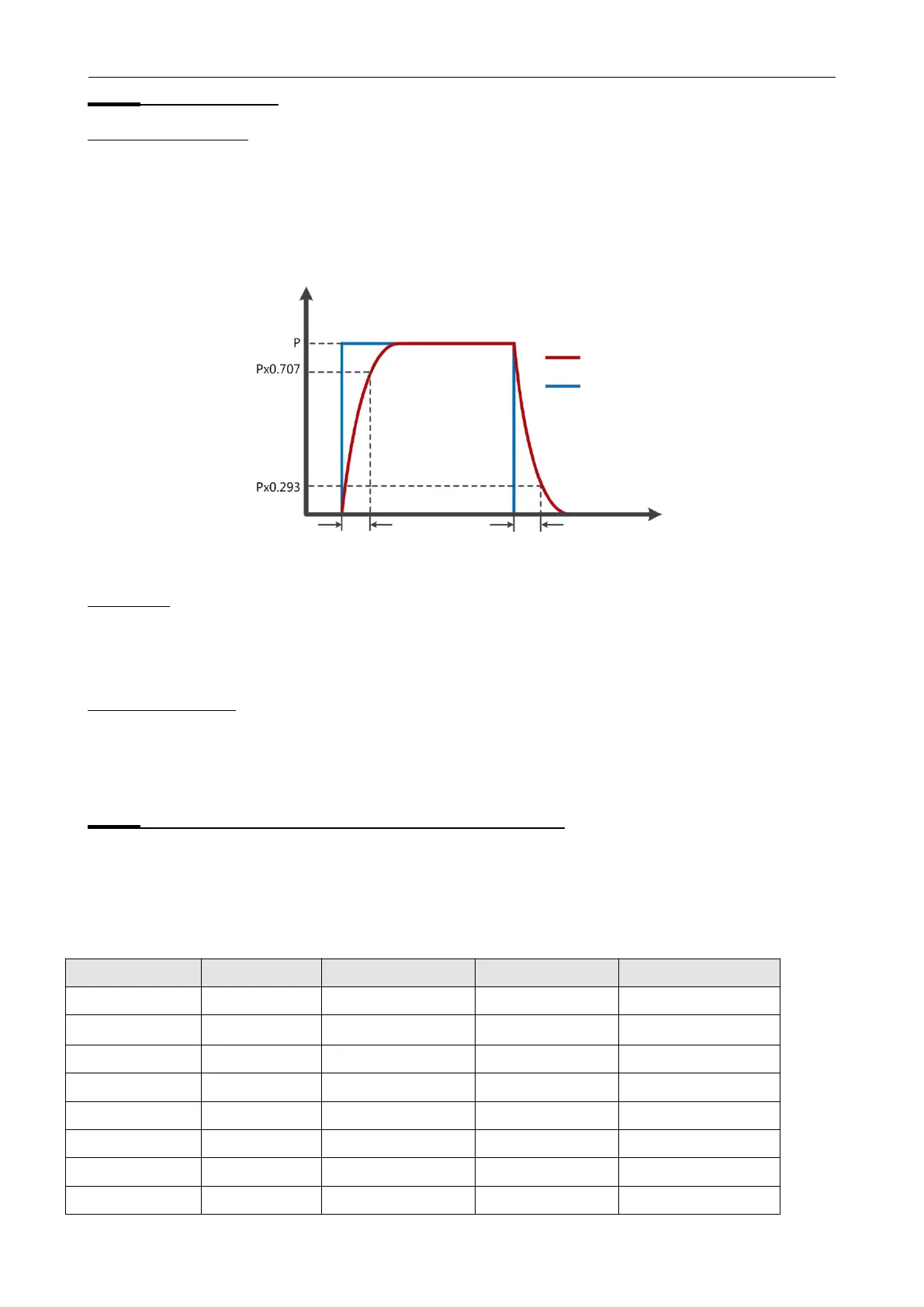
Pulse filter coefficient:Set the filter coefficient so that the externally input pulse command can be
smoothly input to the drive. Adjusting this parameter can reduce the motor vibration caused by
the high electronic gear ratio setting or the lack of acceleration and deceleration of the pulse
command. If the coefficient is set too high, the motor response may be slowed down.。The filter
coefficient can only be adjusted when the motor is stopped.
Figure 6-7 Pulse filter principle
Clear pulse:
The clear pulse function in DIN can clear the number of pulses that the drive has received
but not completed, and the deviation pulse can be adjusted during operation
。When DIN defines a clear
pulse and the actual input changes from 0 to 1, use the rising edge to clear the deviation between
the pre-gear pulse data and the post-gear pulse data.
Position fine-tuning:Position fine-tuning is used to set the position data to be fine-tuned in pulse
mode, speed fine-tuning is used to set the speed of fine-tuning during position fine-tuning, and
the fine-tuning function can be used during pulse positioning operation. When the position fine-
tuning and speed fine-tuning are 0, it means that the fine-tuning function is not enabled.
6.5.3 Electronic gear ratio switching (expert mode)
This function can only be used by expert!
The drive supports 8 sets of electronic gear ratio settings, these settings are only valid in pulse mode(Refers
to Chapter 6.5)。
Table 6-18 Electronic gear ratio switching
Pre-filter instruction pulse

 Loading...
Loading...
