Kinco FD5P AC series servo driver
册
Chapter 6 Operation modes and control modes
6.4
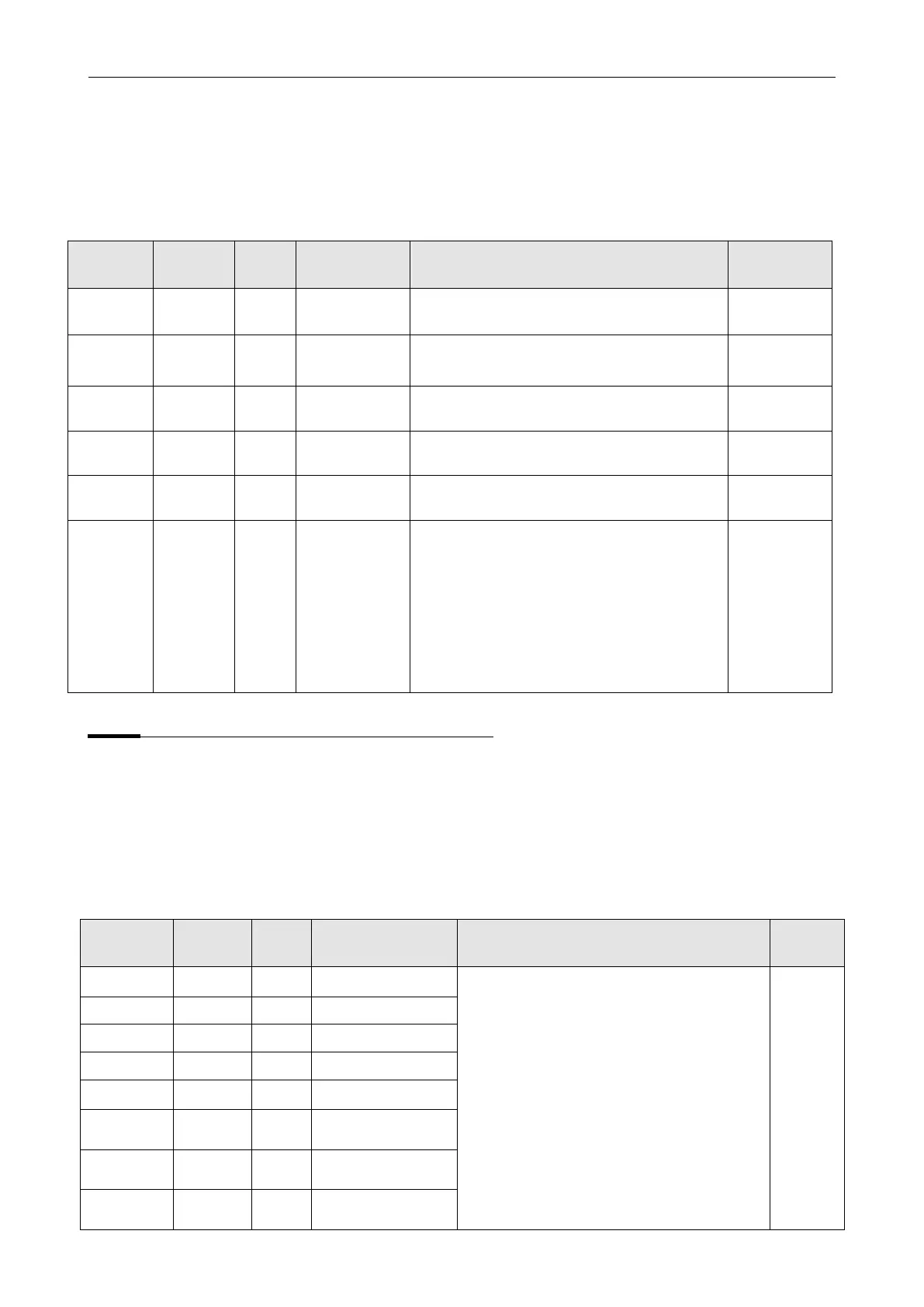
Position mode
(1)
In the position mode, the CD3 motor controller causes the motor to rotate to an absolute or
relative position. The position / velocity command is specified via Target_Position / Profile_Speed
or via position flow
。
Table
6-11
Position mode
6.4.1 DIN introduction to Location Position
First, when using the DIN position mode, at least one of the DIN position index 0, DIN position
index 1, and DIN position index 2 must be defined in the I/O configuration as a switch signal
for the position segment.
DIN position section can be opened through the drive -> control mode >DIN position mode in
the upper computer software menu bar.
Table 6-12 DIN position mode instruction
The speed instruction of the drive is specified by DIN
speed [x], where x is a BCD code
consisting of the following signals:
bit 0: Din_pos[0];
bit 1: Din_pos[1] ;
bit 2: Din_pos[2];
The case where the digits are all 0 cannot
occur;
Set the working mode to absolute/relative position
mode
Target absolute / relative position
Profile speed for positioning
Profile acceleration for positioning
Profile deceleration for positioning
0x2F->0x3F: Activate the absolute position
command. The absolute positioning command will
not be executed immediately according to the
change of the target position. It is used when the
operation mode is 1.
0x4F->0x5F: Activate relative position command,
used when the operation mode is 1.
0x103F: Immediately execute absolute positioning
instructions according to target position changes,
used when the operation mode is 1.
0x0F Location table mode
0x2F->0x3F
0x4F->0x5F
0x0F
0x06
0x103F

 Loading...
Loading...
