Kinco FD5P AC series servo
10.3.3 CANopen Bus communication settings
This chapter will introduce the settings of CAN bus communication parameters. In the host computer
software interface, click Drive->ECAN Configuration->Other to enter the parameter setting interface.
When the master station with network management function is powered on, it will initialize the
parameters of the slave station by sending SDO. In general, parameters such as synchronization ID,
node protection time, node protection time coefficient, node protection station number, emergency
message station number, and heartbeat message generation time do not need to be set by the user.
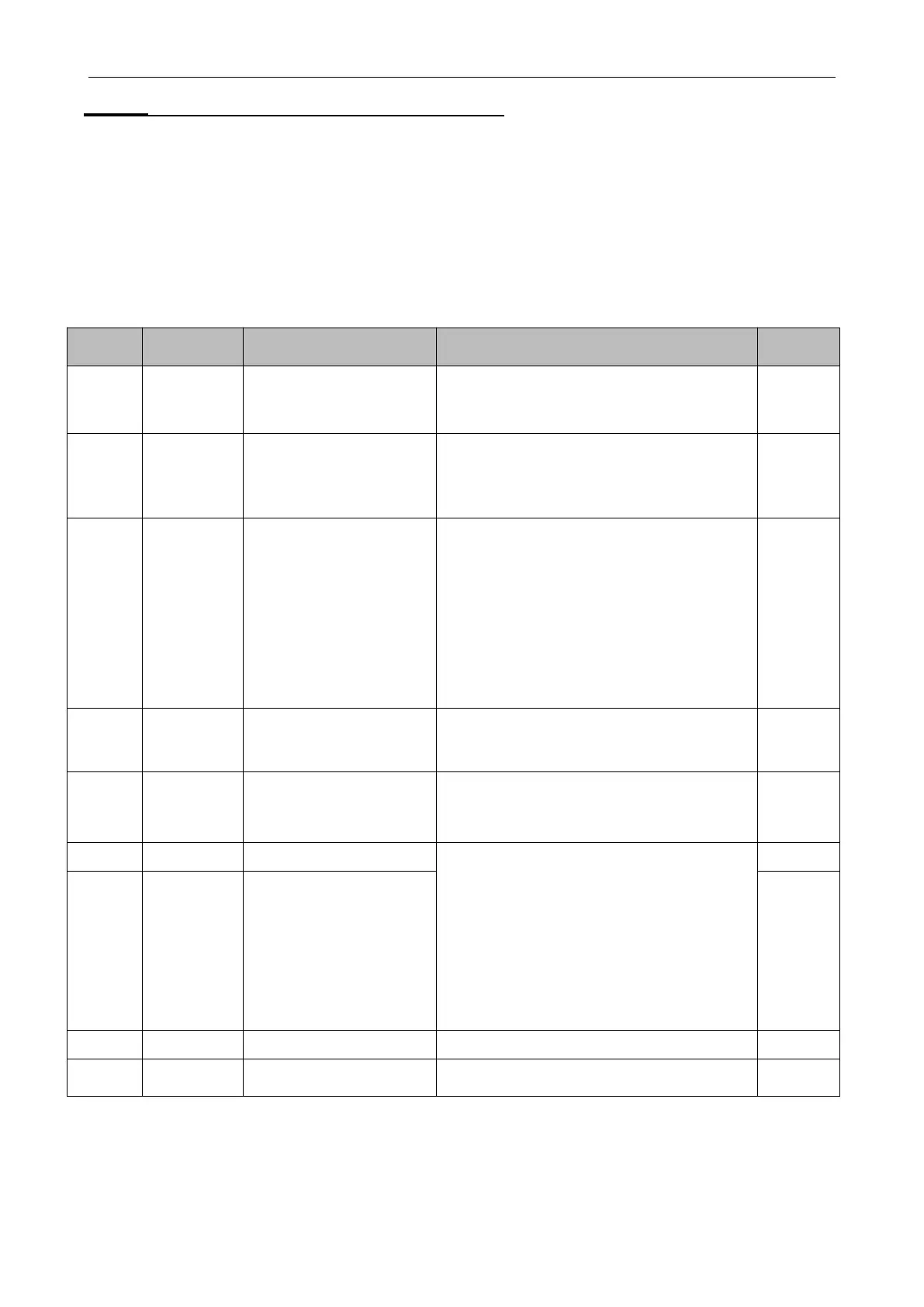
Table 10-29 CANopen communication parameters
Store control loop parameters
1:Stores all set parameters except the motor
10:Initialize all saveable parameters except motor
Drive station No.
Note:To change this parameter, you need to use d5.00
to save and restart.
Note: need to save and restart
Communication interruption
mode
CAN Communication interruption mode
0
:
do not handle
1
:
report an error
Synchronous message COB-ID, the transmission type is
1-240. It is valid in synchronous mode and does not
need to be set in asynchronous mode.
Through node guarding, the master station can monitor
the current status of each node. The master station
sends a remote frame to inquire about the node status
with the node guard time as a period. The node needs to
respond within the node guard time * node guard time
coefficient, otherwise the master station Judging that the
slave station is offline, when the communication
interruption mode is 1, the drive alarms.
700+Divice station No.(0x100B00)
Emergency message station
number
80+ Divice station No.(0x100B00)

 Loading...
Loading...
