Kinco FD5P AC series servo driver
Chapter 4 Controller setup with LED panel
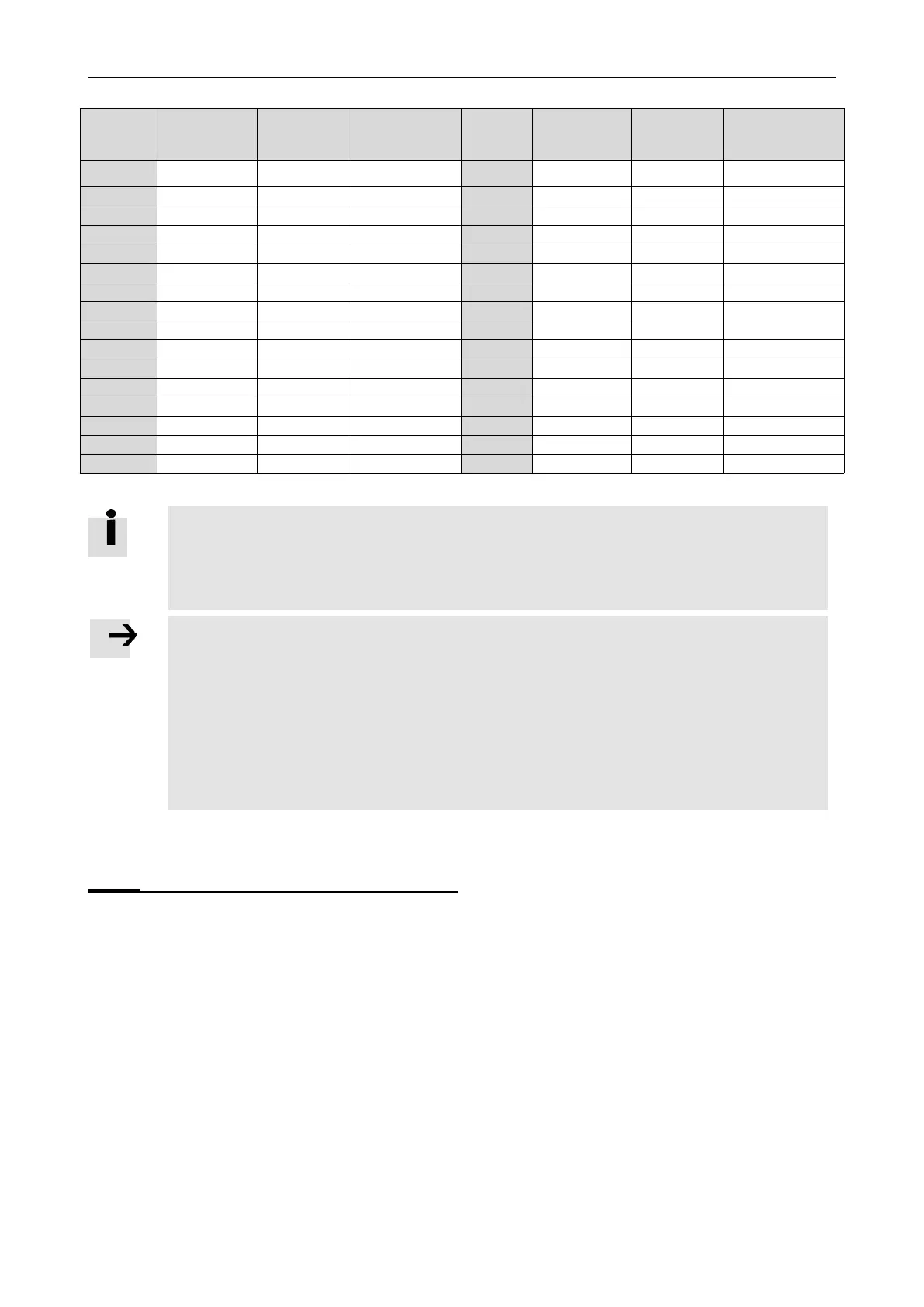
When the setting for the stiffness or inertia ratio results in a Kvp value of greater
than 4000, it isn't useful to increase stiffness anymore。For encoders with less than
80000PPR resolution, the maximum rigidity level is 22.
Note
Complete the EASY process before using the tunE menu feature;
The self-tuning process may cause mechanical jitter, please be ready to cut off
the driver power at any time;
In order to prevent unnecessary mechanical damage, please ensure that the
motor has sufficient range of motion before performing the self-tuning
function.
Table
4-6
Rigidity scale
4.3.4 Reasons for the failure of tunning
1.
Incorrect wiring
2.
The motor model is incorrectly set
3.
The pre-enable function is configured for the input port, but is disabled
4.
The set motor bearing is subjected to too much friction or other external forces
5.
There is a large mechanical gap between the motor and the load
6.
Very low mechanical rigidity
7.
The load inertia ratio is too large
8.
Load flexible connection
9.
Acceleration and deceleration is less than the viscous friction torque

 Loading...
Loading...
