Kinco FD5P AC series servo driver
册
Chapter 6 Operation modes and control modes
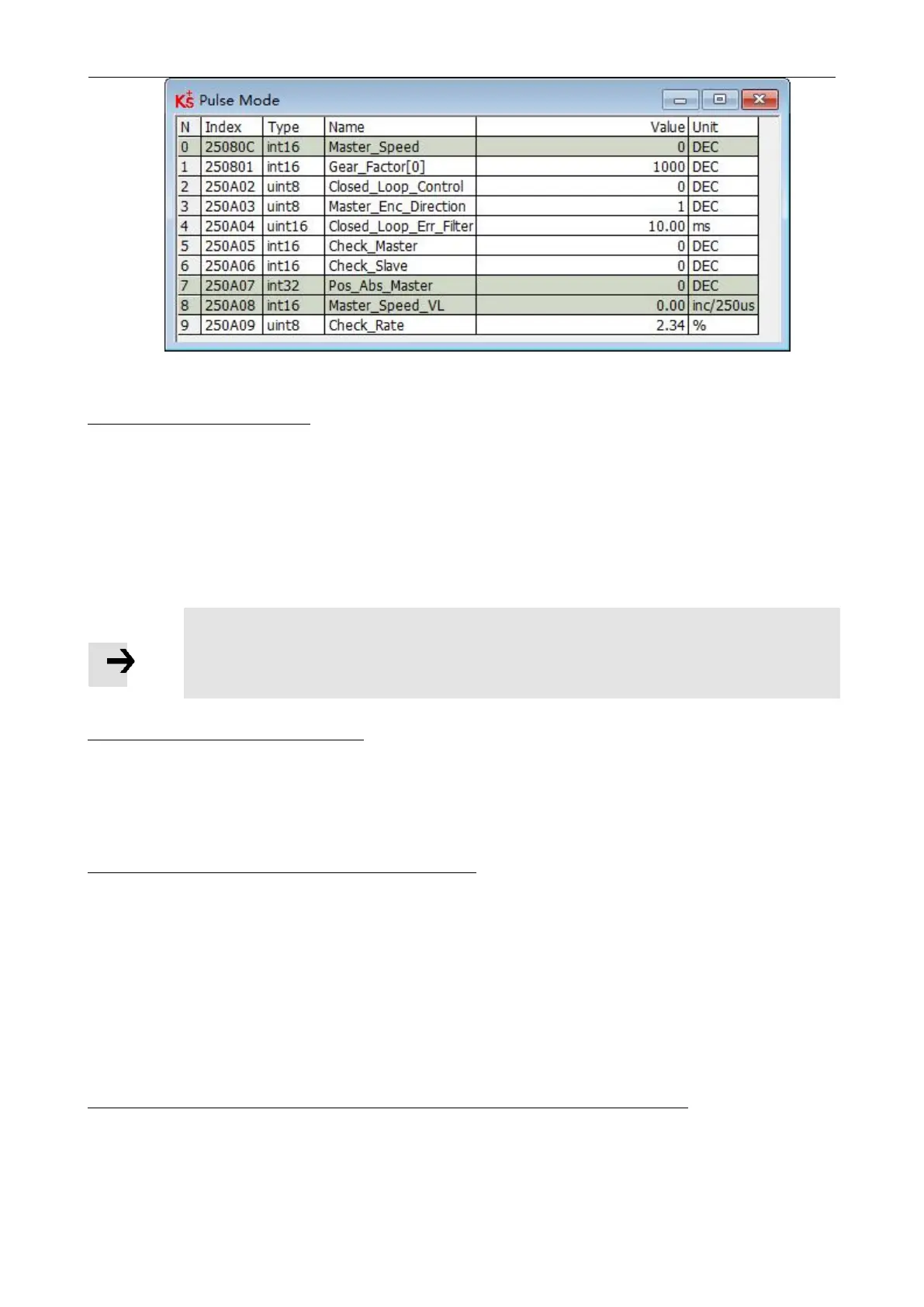
Figure 6-13 Close loop setting window
Step 2:confirm pulse mode
Wiring according to the out signal of the external encoder and confirm the pulse mode according
to the signal type of the external encoder. Rotate the external encoder and you can see the
continuous change of the front pulse data of the gear.
When the external encoder moves a fixed distance and feeds back the same gear pre-pulse data,
you can enter the next step, otherwise, please check the external encoder installation, hardware
wiring and pulse mode again.
Note
After the change of pulse mode(2508.03)the control parameter need to be saved
and it will effect after reboot drive.
Step 3:Set the main encoder cycle
The main encoder cycle needs to fill in the number of AB-phase pulses between two adjacent Z-
phase signals of the external encoder. If the rotary encoder has 1 Z-phase signal per revolution,
the main encoder period is equal to the resolution of the external encoder. Setting the main
encoder cycle to 0 means not to detect the number of pulses between adjacent Z signals.
Step 4:Sets the main encoder counting direction
When the counting direction of the main encoder and the motor encoder is inconsistent, the full
closed-loop fault alarm will appear when the full closed-loop control is turned on, which can be
adjusted by the counting direction of the main encoder (0x250A03).
Main encoder count the default value is 1, rotate the motor shaft and observe its absolute position
and the main direction of the change of the absolute position encoder, if change the position of the
two objects in the same direction you do not need to modify the master the direction of the
encoder count number, if two position changes direction is not consistent the direction should be
the main encoder count is set to 0.Note: All above operations are done with loose shafts.
Step 5: Set up full-closed-loop master check and full-closed-loop slave check
The calculation method of the master-slave axis ratio is as follows : Firstly, the full closed-loop
control is set to 0 and the mechanical connection between the motor and the main encoder is
intact and non-skid. Clear the gear front pulse data and remember the actual position value (such
as 150231), manually rotate the motor to drive the main encoder to operate for a certain distance,

 Loading...
Loading...
