Kinco FD5P AC series servo driver
册
Chapter 6 Operation modes and control modes
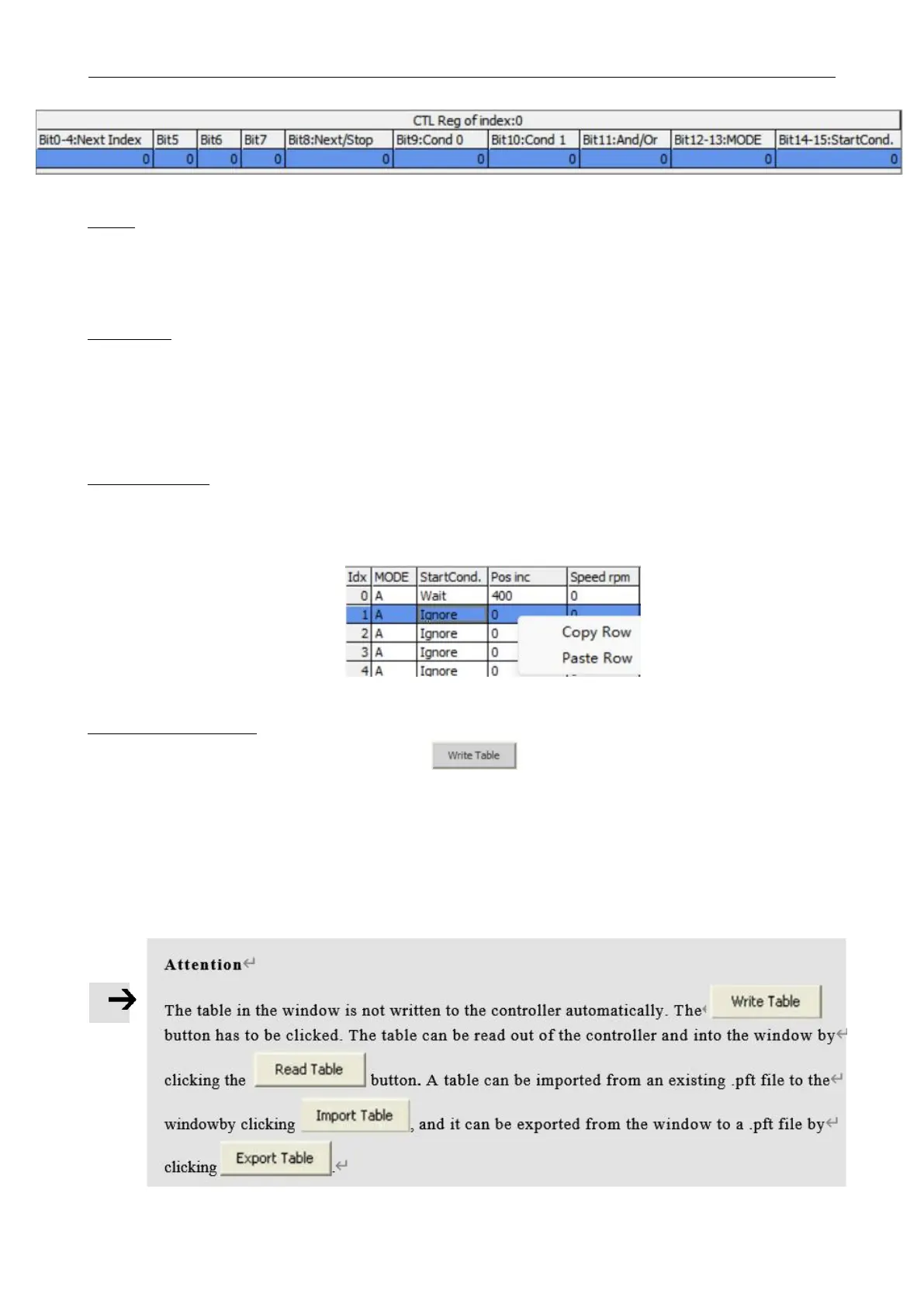
For convenience, all CTL_Reg bits can be set in the following fields:
Figure 6-5 CTL Reg edit
Loops
Defines loop limit for the task which is running in loops;
0: no limit,
≥ 1: position flow stops when loop count = loops, or if the next index
’
s loop count = next index
’
s loops.
Remaining
The remaining number of times the task can be executed,invalid when the Loops is 0.
The data is imported from the loop when the position flow is started. Each time a task is executed,
the remaining number of times is reduced by one. When the remaining number of times is reduced
to 0, the corresponding task will exit the execution.
Copy and paste
The task information of the location table can be copied to another row. Right-click on the
task of any row selected, and the following window will appear. Click Copy Row, then select
another row, and click Paste Row
.
Figure 6-6 Position flow copy
Activate position flow
After the setting of position flow,click button to write it into drive.
Start the table via DIN with the Start PosTable function. The entry index task is triggered and position
flow is started (via StartCond rule).
The DIN AbortPosTable signal (rising edge) or deleting the Start PosTable function
configuration in DIN aborts a running position flow after the currently running task is finished.
Position flow is aborted immediately if an error occurs or if the Operation_Mode is changed.
 Loading...
Loading...

