113
Rev. 2.0
07/27/2023
MBDV Hardware Manual
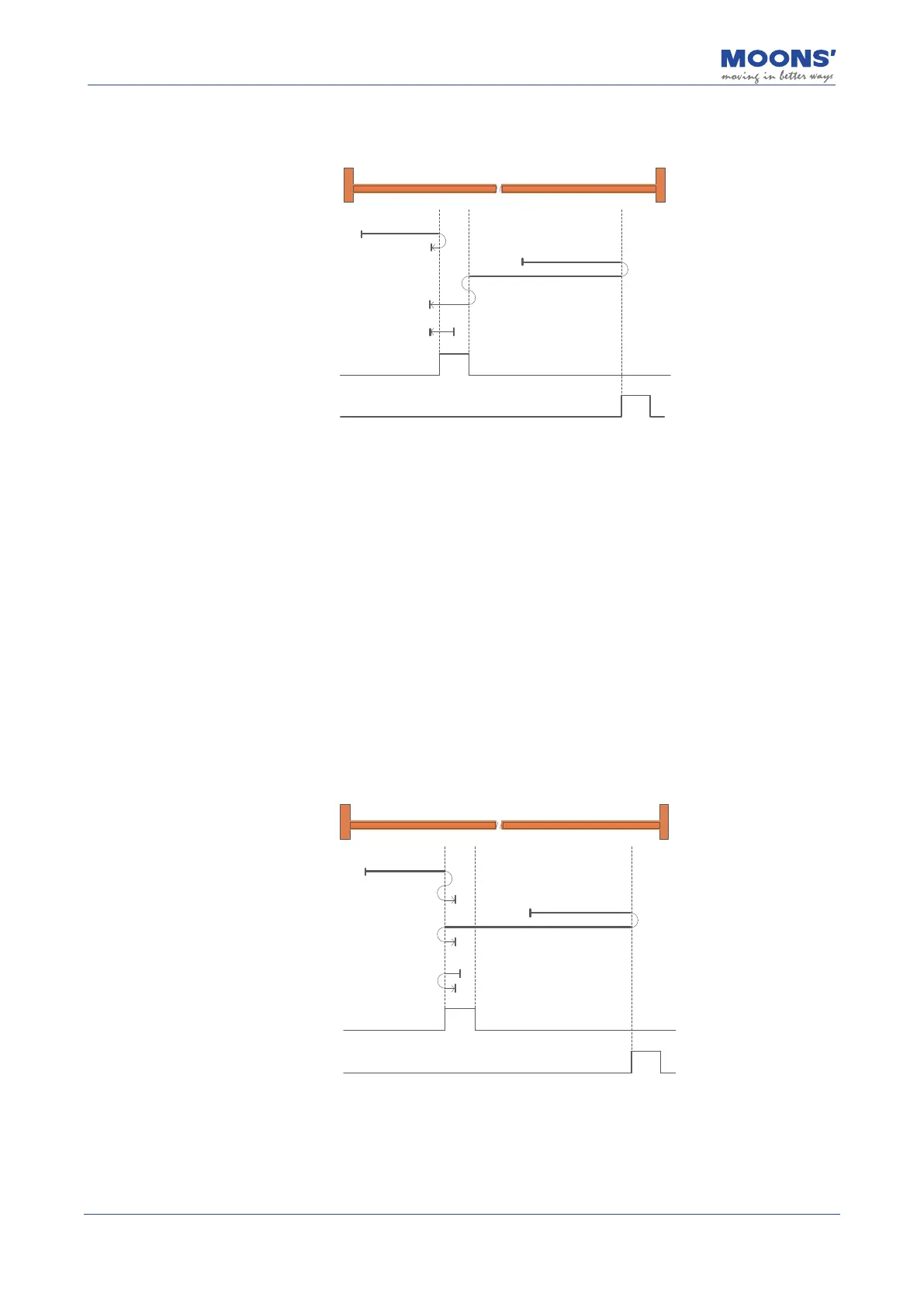
7.8.2.26 Return to origin mode 23: Forward return, look for the falling edge signal of the
origin sensor, and automatically reverse when encountering the positive limit
H
L
H
H
L
L
Home Switch Signal
Positive limit switch signal
Movement Track
a) When starting to return, HOM-SW=0 and it is located on the negative side of the origin sensor.
Start returning at high speed in positive direction. After encountering the rising edge of HOM-SW,
decelerate, reverse, and run at low speed in negative direction. When encountering HOM-SW Stop
after falling edge.
b) When starting to return, HOM -SW=0 and it is located on the positive side of the origin sensor,
and starts to return at high speed in the positive direction. After encountering the rising edge of
POT, decelerate, reverse, and run at high speed in the negative direction; After the rising edge,
decelerate, reverse, forward and run at low speed to HOM-SW After the invalid position, it will
decelerate and stop, and then run at a low speed in the negative direction, and stop when it
encounters the falling edge of HOM-SW.
c) When starting to return, HOM-SW=1, start the return at low speed in negative direction, and stop
after encountering the falling edge of HOM-SW.
7.8.2.27 Return to origin mode 24: forward return, look for the rising edge signal of the
origin sensor, and automatically reverse when encountering the positive limit
H
L
H
H
L
L
L
Home Switch Signal
Positive limit switch signal
Movement Track
a) When starting to return, HOM-SW=0 and it is located on the negative side of the origin sensor.
Start returning at high speed in positive direction. After encountering the rising edge of HOM-SW,
decelerate, reverse, and run at low speed in negative direction until HOM-SW is invalid. After the
position, it decelerates to stop, and then runs forward at low speed, and stops when it encounters
the rising edge of HOM-SW.