135
Rev. 2.0
07/27/2023
MBDV Hardware Manual
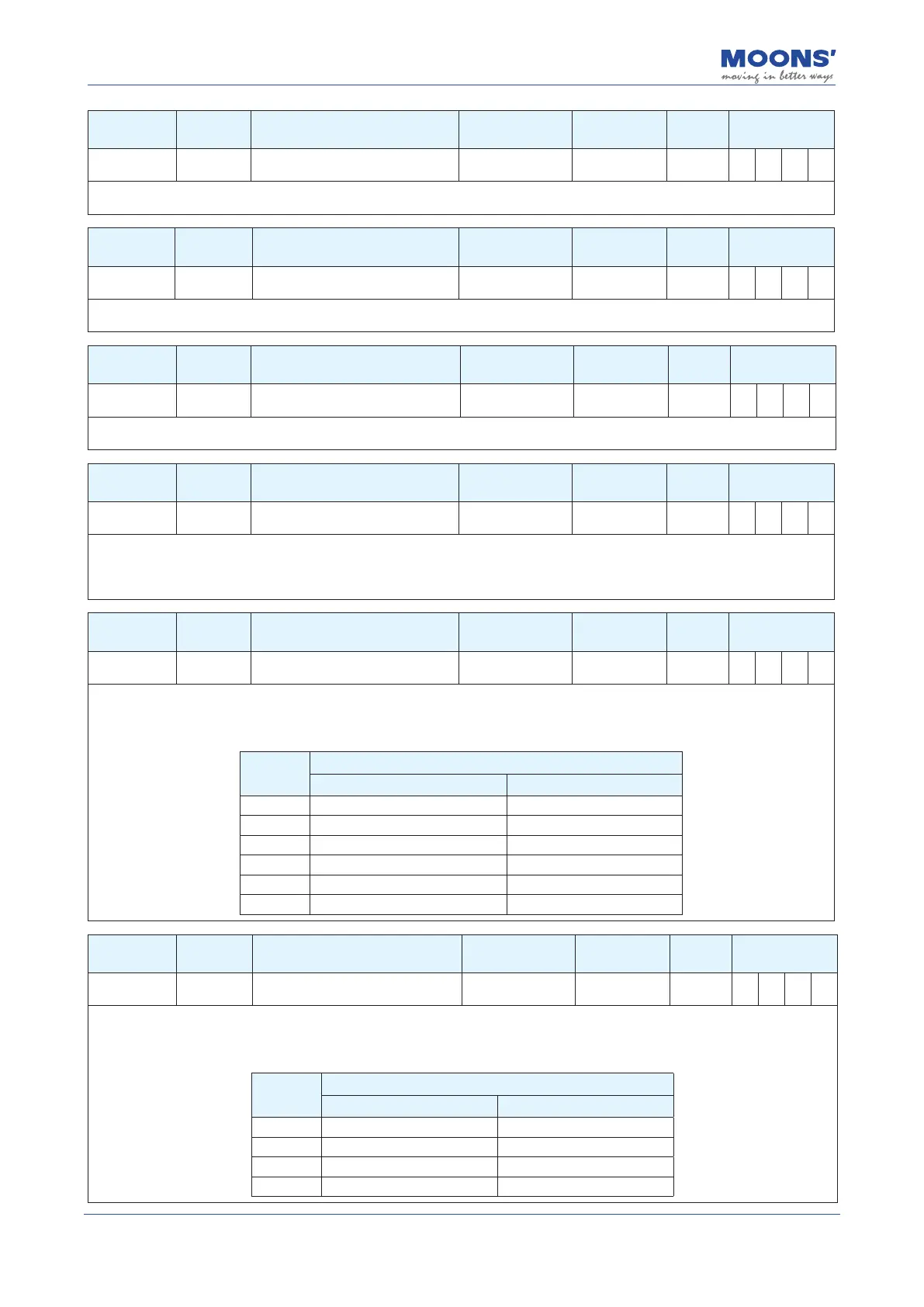
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P1-25 CX Second torque limit 3000 0 ~ 3000 0.1% P S T
Sets the second limit value of the motor output torque. Please refer to chapter 7.5 Torque limit
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P1-26 CY Third torque limit 3000 0 ~ 3000 0.1% P S T
Set the third limit value of motor output torque. Please refer to chapter 7.5 Torque limit
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P1-27 CY Fourth torque limit 3000 0 ~ 3000 0.1% P S T
Set the fourth limit value of motor output torque. Please refer to chapter 7.5 Torque limit
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P1-28 HT Motor stall protection time 0 0 ~ 30000 ms P S T
In position mode or position-based speed mode, stalling causes the drive to always output the rated torque of the motor. Stalling for a
long time can cause the motor to overheat. This parameter sets the protection time of the motor stall, when the actual output current
of the motor is equal to the rated current of the motor, and the time exceeds the setting of this parameter. r37ST (motor stall alarm)
will be generated and the motor will be disabled.
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P1-29 YV
The action of the dynamic brake
when it is disabled
0 0 ~ 5 --- P S T
Servo is OFF, the dynamic braking action is set by parameter P1-29, and the longest action time during deceleration is set by
parameter P1-31, please refer to the table below. The deceleration process means that when the dynamic braking takes eect, the
actual speed of the motor decelerates from the speed when it takes eect to within the zero-speed threshold of parameter P5-42, or
the deceleration time reaches the set time of P1-31.
Value
Description
Deceleration process After stopping
0 Slow down with parameter P2-01 Remain free-moving state
1 Slow down with parameter P2-01 Dynamic braking action
2 Free-moving state Remain free-moving state
3 Free-moving state Dynamic braking action
4 Dynamic braking action Remain free-moving state
5 Dynamic braking action Dynamic braking action
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P1-30 YR
The action of the dynamic brake
when an error is reported
0 0 ~ 3 P S T
When the servo reports an error, the dynamic braking action is set by parameter P1-30, and the longest action time during
deceleration is set by P1-32, please refer to the table below. The deceleration process means that when the dynamic braking takes
eect, the actual speed of the motor decelerates from the speed when it takes eect to within the zero-speed threshold of parameter
P5-42, or the deceleration time reaches the set time of P1-31.
Value
Description
Deceleration process After stopping
0 Free-moving state Remain free-moving state
1 Free-moving state Dynamic braking action
2 Dynamic braking action Remain free-moving state
3 Dynamic braking action Dynamic braking action