146
Rev. 2.0
07/27/2023
MBDV Hardware Manual
Parameter Instruction Name Defaults Range Unit Related Patterns
P5-38 PL Dynamic error threshold 10
0 ~
2147483647
pulses P S T
Position mode, parameter P5-38 sets the judgment condition for dynamic position error overrun output.
◆
Dynamic position error overrun output judgment conditions:
Dynamic position error refers to the output of this signal when the dierence between the actual position of the motor and the
commanded position is greater than P5-38 during the operation of the motor.
No Output
Output Signal
Dynamic position error
Overrun output
P5-38
-(P5-38)
Position Error Curve
0
0
1500
Motor Speed
Parameter Instruction Name Defaults Range Unit
Related
Patterns
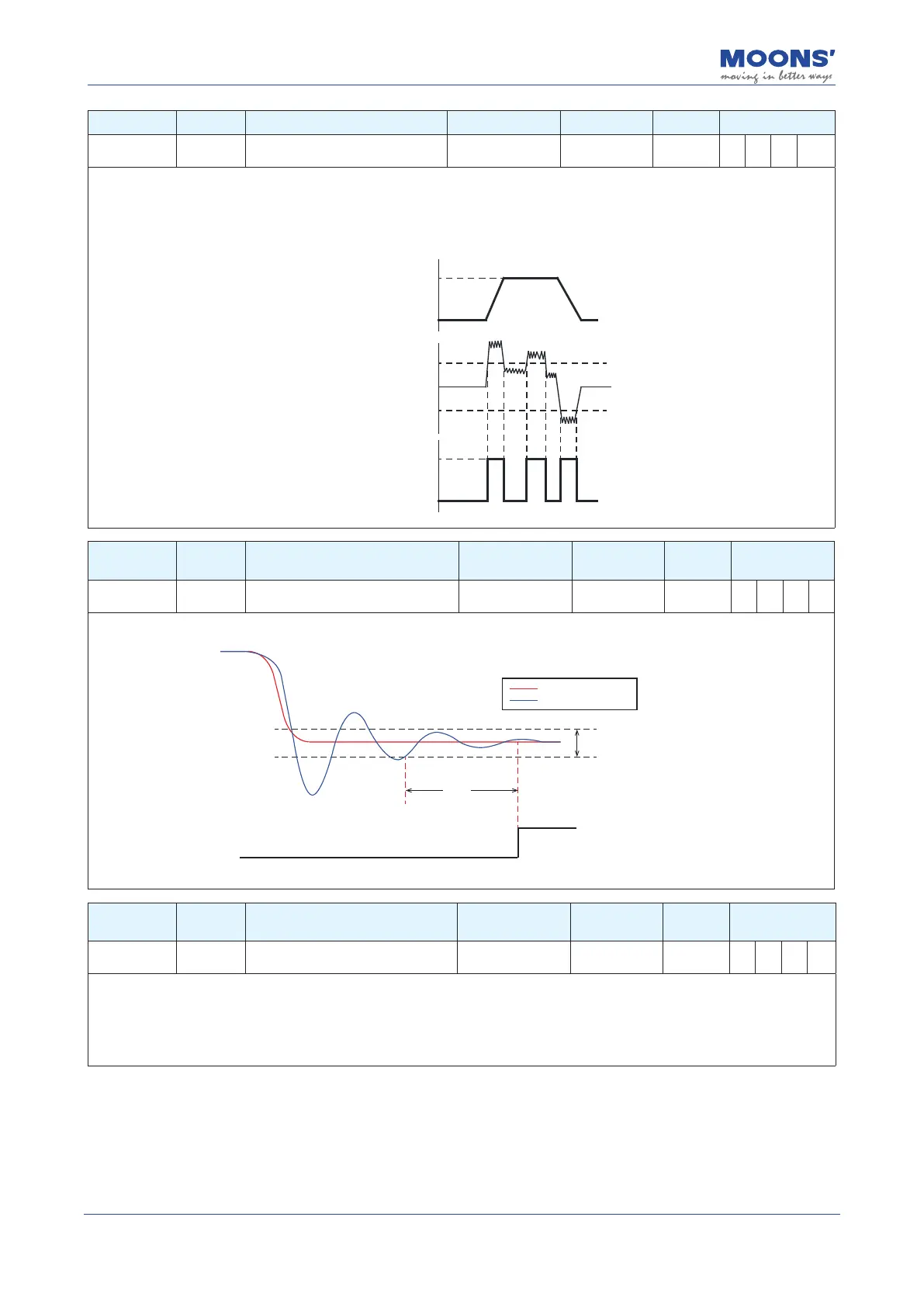
P5-39 PD Positioning complete error margin 40 0 ~32000 pulses P S T
The position mode, parameter P5-39 sets the judgment condition of the positioning completion signal output.
Command Curve
Actual Position Feedback
Position arrival signal output
P5-40
P5-39
Moving
(Count time for positioning
completion)
(Positioning complete
signal position error )
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P5-40 PE Motion condition timer 10 0 ~ 30000 ms P S T
Sets the timer for various motion conditions. Depending on the control mode used, this timer will be relevant to dierent motion
characteristics. Please see the following sections for detailed information.
7.2.3 Position Complete Signal
7.3.5 Velocity Reached Output
7.3.6 Velocity Consistent Output