148
Rev. 2.0
07/27/2023
MBDV Hardware Manual
Parameter Instruction Name Defaults Range Unit
Related
Patterns
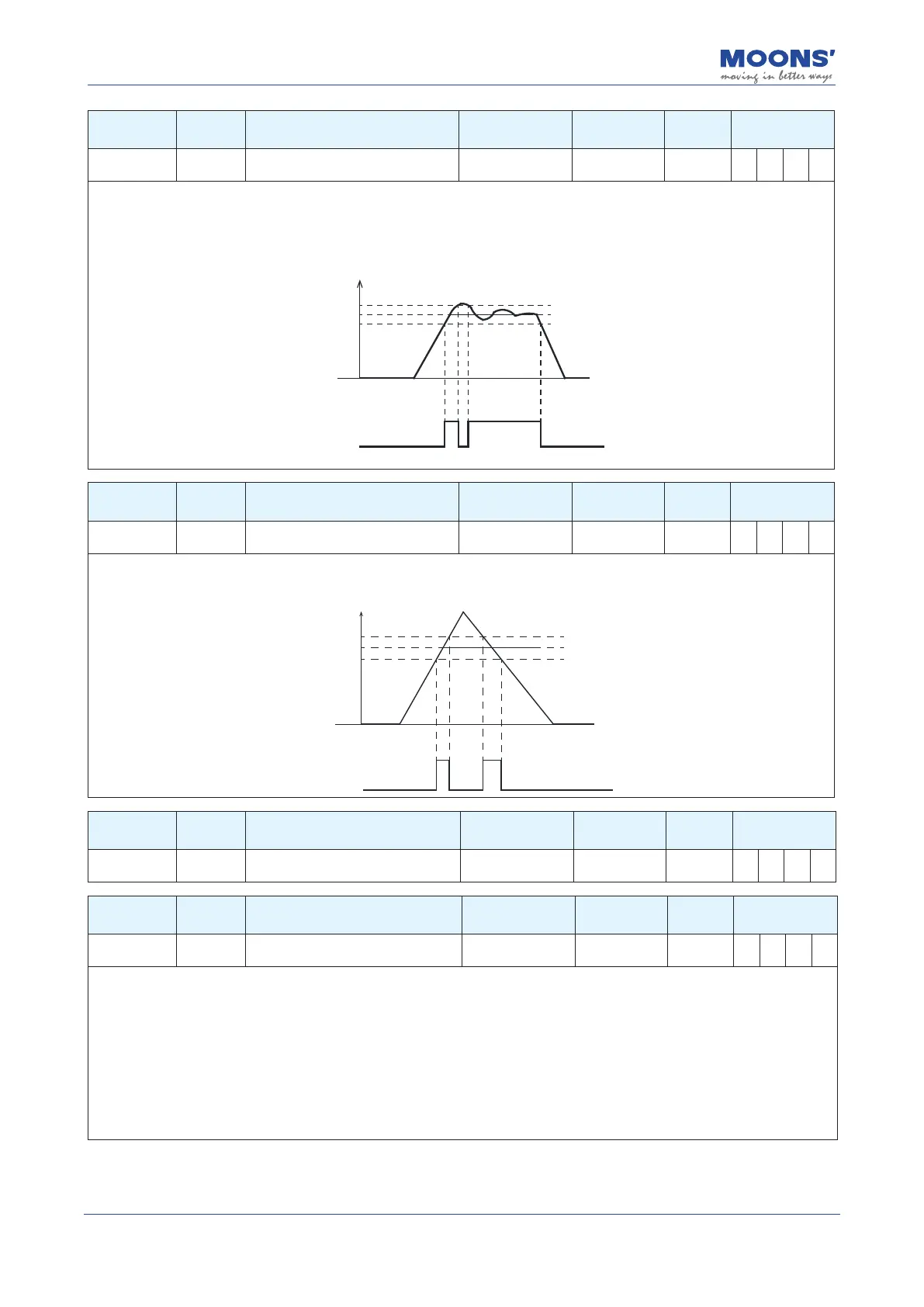
P5-45 TV
Torque Reached - Permissible
uctuation range
10 0 ~ 3000 0.1% P S T
When operating in torque control, if the absolute value of the actual torque reaches the target torque (P1-07), remains within the
permissible uctuation range (P5-45) for the amount of time specied by P5-40, the T
orque Reached output signal (TQ-REACH) will
be output.
If any of the above conditions is not satised, the TQ-REACH signal will not be output.
P5-45
P1-07
-P5-45
Torque
Time
Torque reaches output
No Output No Output
Output
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P5-46 DG Absolute position 10000
-2147483647 ~
+2147483647
pulses P S T
When the actual position of the motor is equal to the setting of parameter P5-46, it will output the same P-COIN signal. The uctuation
range is
±
100pulses. .
Actual Position
Parameters (P5-46)
(P5-46)+100pulses
(P5-46)-100pulses
Position Reached Output
Time
No Output No Output
Output
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P5-47 LP Positive software limit 0
-2147483647 ~
+2147483647
pulses P S T
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P5-48 LM Negative software limit 0
-2147483647 ~
+2147483647
pulses P S T
Parameter P5-47 ~ P5-48 set the internal software limits of the drive.
When the motor is moving in the positive direction, and the current position is equal to or exceeds the set value of P5-47, the positive
software limit reached alarm will be generated
When the motor is moving in the negative direction, and the current position is equal to or exceeds the set value of P5-48, the
negative software limit reached alarm will be generated
Note:
◆
When the encoder type is incremental encoder, after the drive is powered on, parameters P5-47 and P5-48 can be set and the
software limit can work normally, but cannot be saved after power o. After power on again, the parameter returns to the default value
" 0 "