Chapter 7: Optional Equipment Installation
NOTE: The two sides do not have to have a hardstop in the same position, i.e.,
you can use Position 1 on one side, and Position 2 (or none) on the other, if you
choose.
Modifying Joint Limit Softstop Locations for Joint 1
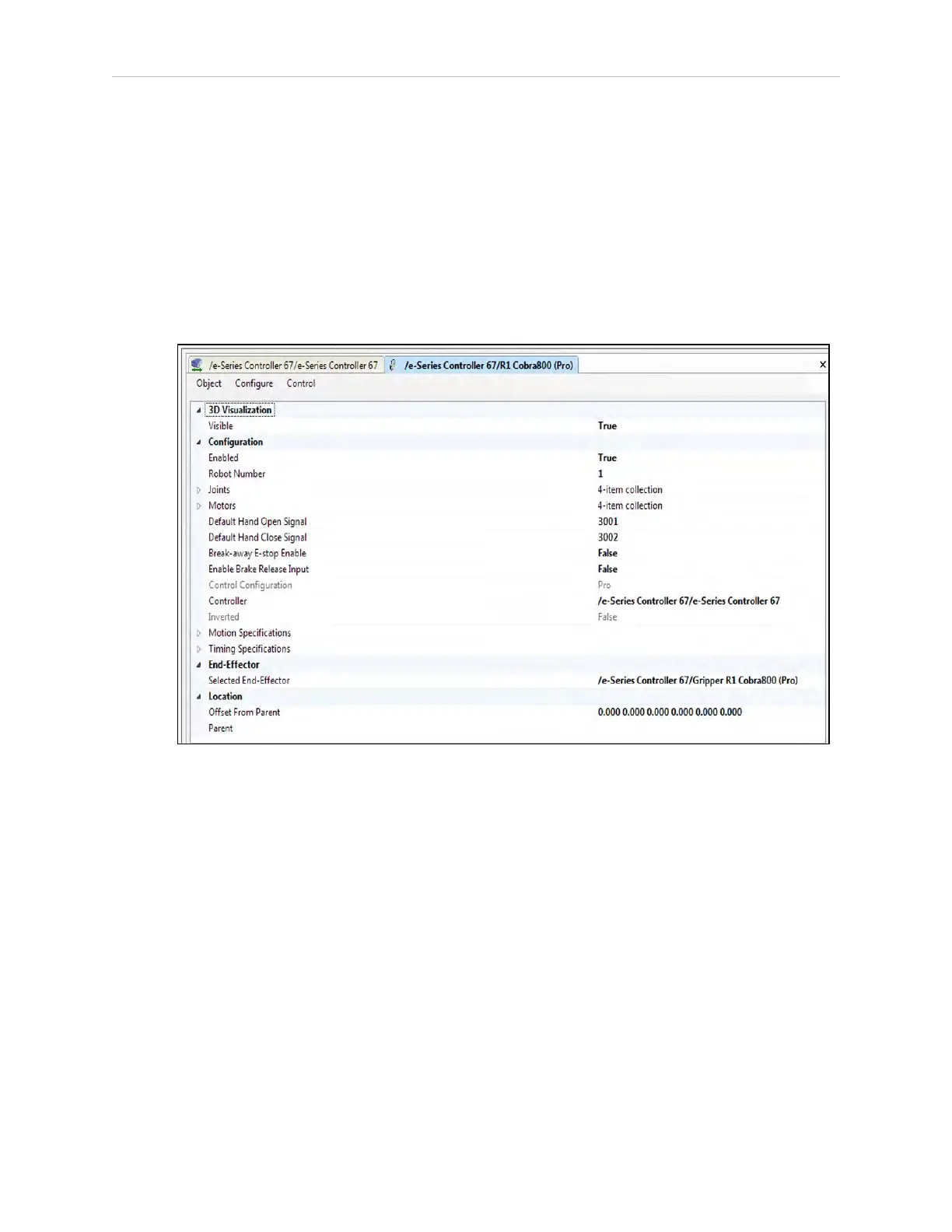
After installing the adjustable hardstops, you must modify the softstop locations using the
ACE software.
1.
From ACE, select the robot in the tree structure pane.
2.
Open the robot editor.
Figure 7-17. Robot Editor, with Joints Collapsed. Note that Joint 1 of the robot is Element 0.
3.
Click the ‘+’ in front of Joints, to display all of the joints.
14402-000 Rev. F eCobra User's Guide 143