174 eCobra User's Guide 14402-000 Rev. F
8.2 Robot Specifications
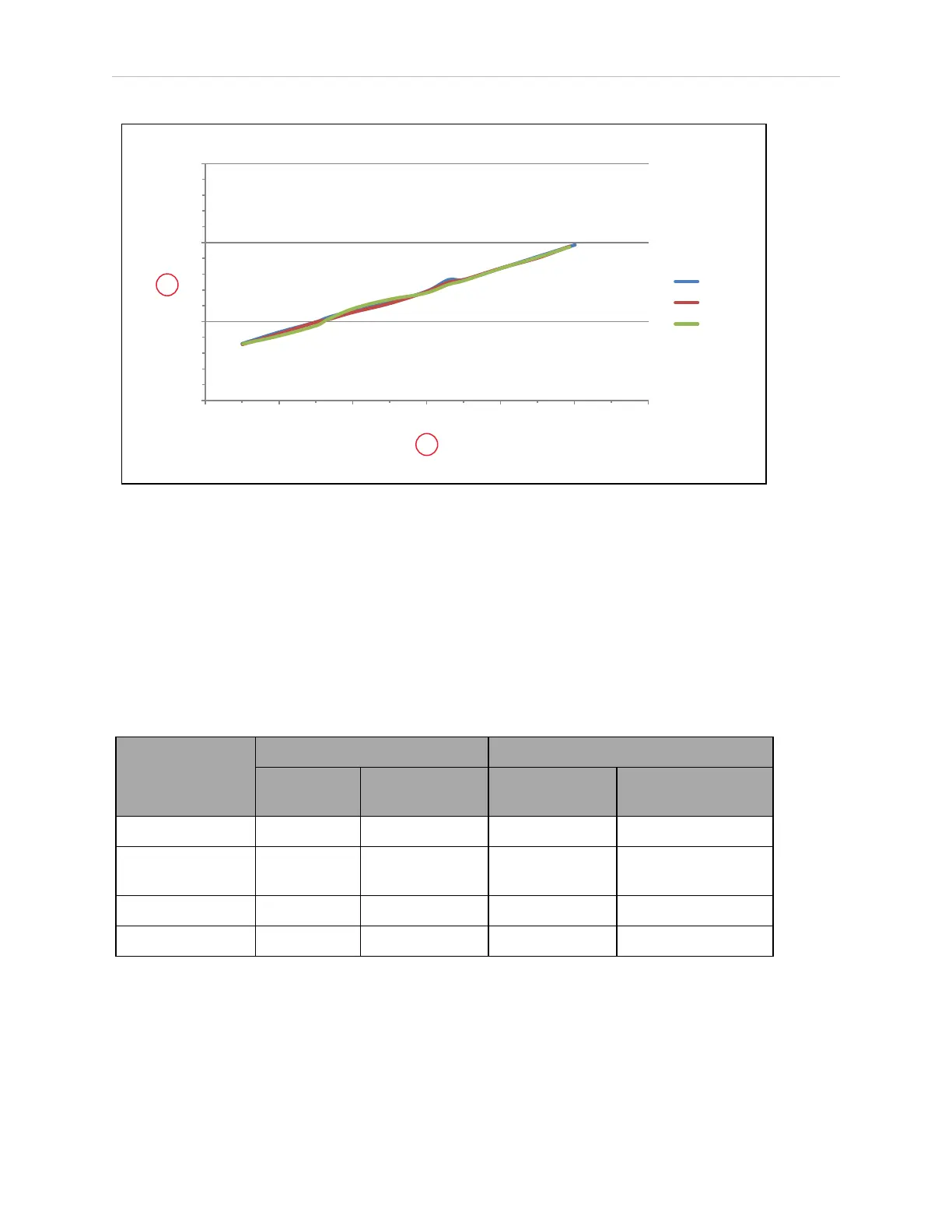
0
0.1
0.2
0.3
0 20 40 60 80 100 120
33%
66%
100%
3
4
Figure 8-27. Joint 3 Stopping Time for eCobra 800, in Seconds
Stopping distances and times will not degrade as a result of either aging or normal use. Stop-
ping distance will vary only if there is an actuating mechanism failure, which may require
replacement of the failed component.
If an integrator wants to perform their own measurement of stopping distances and time in a
real cell with a real robot and with real tools and loads, contact your local Omron support.
Hardstops and Softstops
Table 8-12. Softstop and Hardstop Specifications
Joint eCobra 600 eCobra 800/800 Inverted
Softstop Hardstop –
Approximate
Softstop Hardstop –
Approximate
Joint 1 ± 105 ± 108 ± 105/±123.5 ± 108/±127.5
Joint 2 ± 150 ± 151 ±157.5/±156.5
±155 Inv. IP65
± 160
±158.5 Inv. IP65
Joint 3 0 to 210 mm -5 to 215 mm 0 to 210 mm -5 to 215 mm
Joint 4 ± 360 not applicable ± 360 not applicable