80 eCobra User's Guide 14402-000 Rev. F
5.3 Brakes
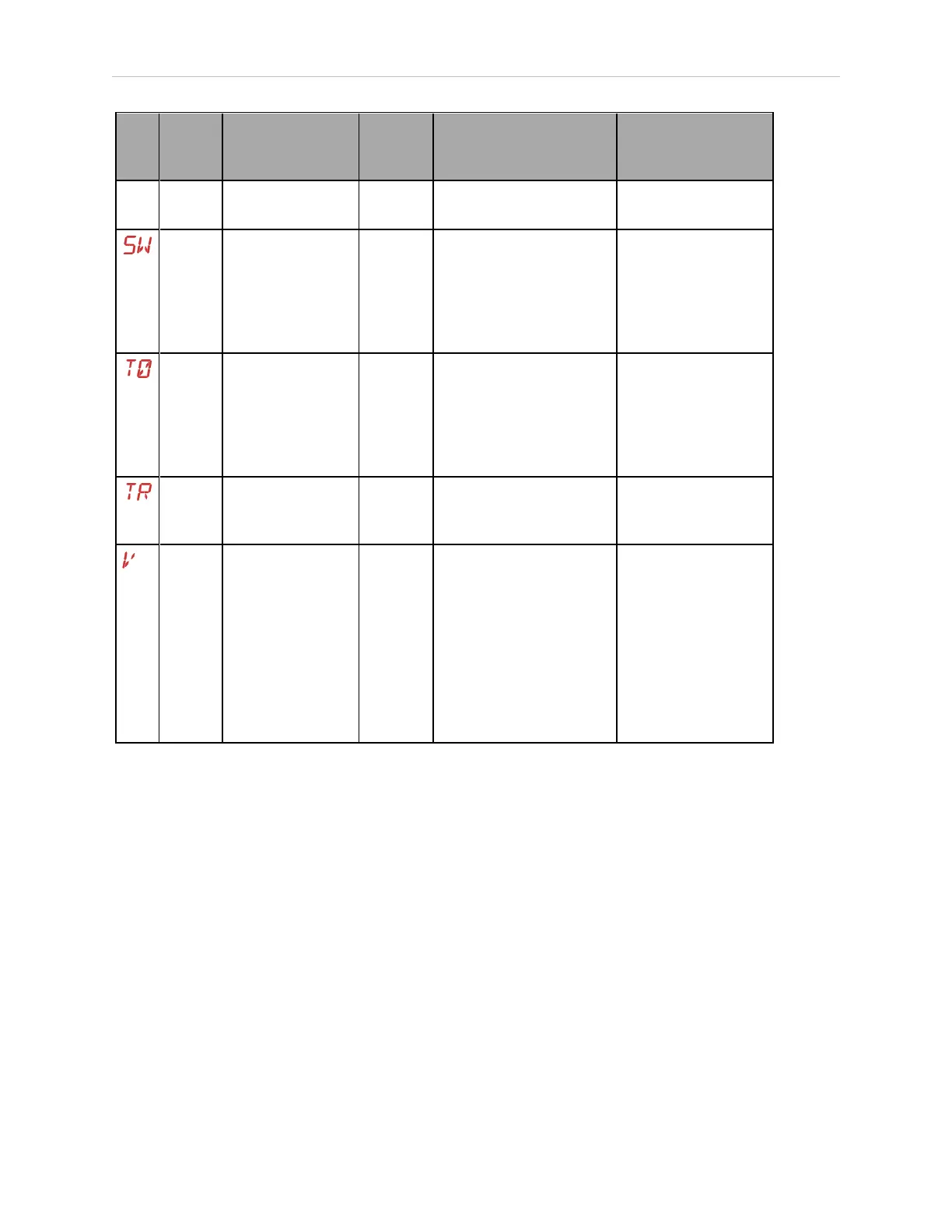
LED
Status
Code
V+
Error
Message
V+
Error
Code
Explanation User Action
Not
Commissioned*
not been commissioned
and verified.
verify the E-Stop
Delay.
SW None N/A Software watchdog
timer timeout. On some
products it is normal for
this to occur moment-
arily during a servo
reset.
If the problem per-
sists, contact your
local Omron support.
T0 *Safety System
Fault* Code 10
-1109 An error was detected
during a software self
test of a secondary
safety and monitoring cir-
cuit (SRV_DIRECT /
SRV_STAT).
Contact your local
Omron support.
TR *Safety System
Not
Commissioned*
-648 The Teach Restrict fea-
ture has not been com-
missioned and verified.
Commission and
verify the Teach
Restrict feature.
V# *Hard envelope
error* Mtr #
-1027 The indicated motor was
not tracking the com-
manded position with
sufficient accuracy as set
by ACE.
Turn on high power
and try to perform
the motion at a
slower speed. Make
sure that nothing is
obstructing the
robot's motion. If
the error recurs, con-
tact your local
Omron support.
NOTE: For more information on status codes, refer to the Status Codes for
Embedded Products document.
5.3 Brakes
The robot has a braking system that decelerates the robot in an emergency or abnormal situ-
ation, such as when the emergency stop circuit is open or a robot joint passes its softstop.
The braking system will not prevent you from moving the robot manually once the robot has
stopped (and high power has been removed).
In addition, Joint 3 has an electromechanical brake. The brake is released when high power is
enabled. When high power is turned off, the brake engages and holds the position of Joint 3.
Brake Release Button
Under some circumstances you may want to manually position Joint 3 on the Z-Axis without
turning on high power. For such instances, a ‘Z’ Brake Release button is located above the