84 eCobra User's Guide 14402-000 Rev. F
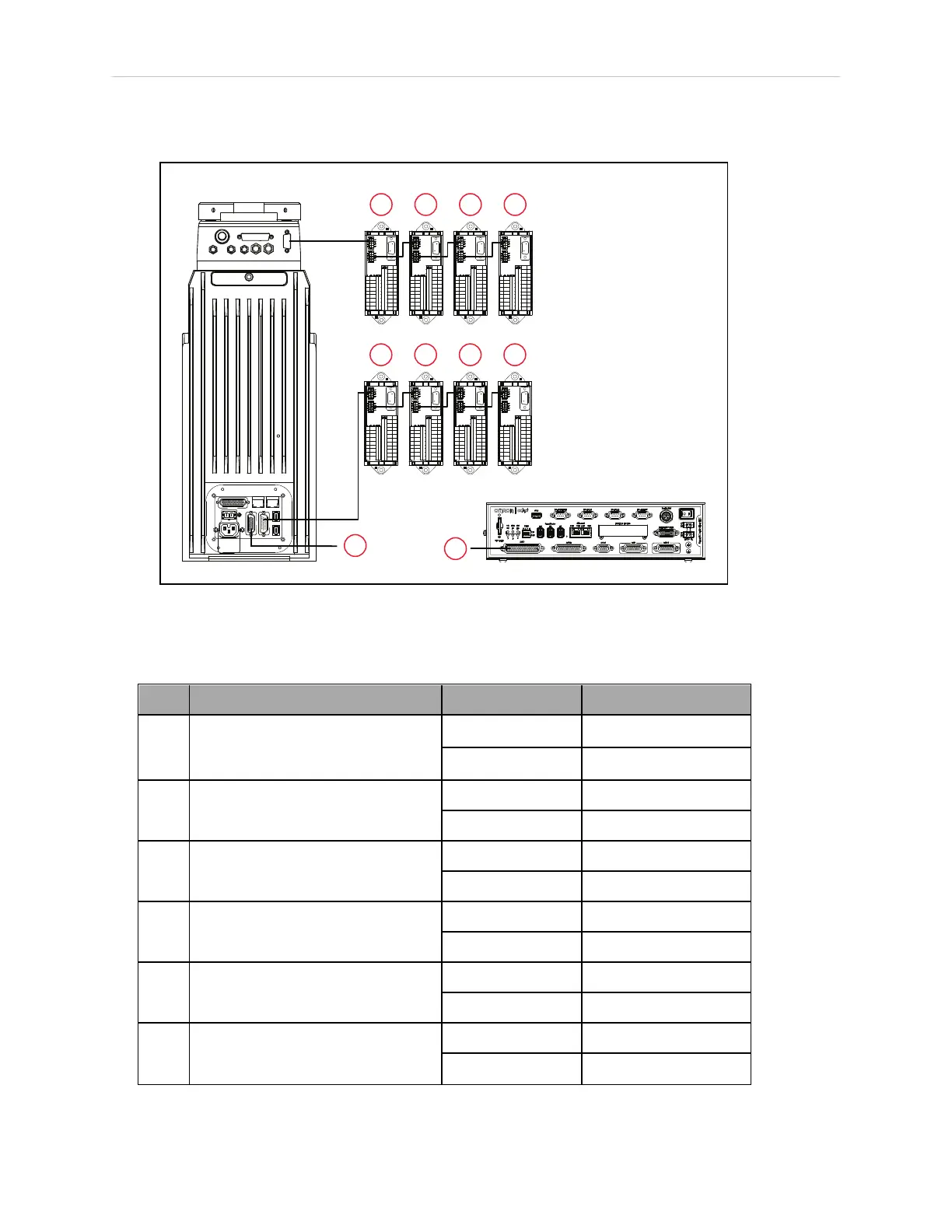
5.5 Connecting Digital I/O to the System
Default Digital I/O Signal Configuration
DC
IN
24V
GND
AC
200 -
240V
Ø
1
XBELTIO
XIO
Servo
ENETENET
XSYSTEM
SmartController EX
eCobra Robot
1
2
10
9
8
7
6
5
4
3
Figure 5-4. Connecting Digital I/O to the System
Table 5-4. Default Digital I/O Signal Configuration, Single Robot, no SmartController EX
Item Location Type Signal Range
2
Robot 1 XIO connector
a
On eAIB panel.
Inputs 1001–1012
Outputs 0001–0008
3
IO Blox 1 Inputs 1033–1040
Outputs 0033–0040
4
IO Blox 2 Inputs 1041–1048
Outputs 0041–0048
5
IO Blox 3 Inputs 1049–1056
Outputs 0049–0056
6
IO Blox 4 Inputs 1057–1064
Outputs 0057–0064
7
IO Blox 5 Inputs 1065–1072
Outputs 0065–0072