Chapter 3: Robot Installation
3.1 Installation Overview
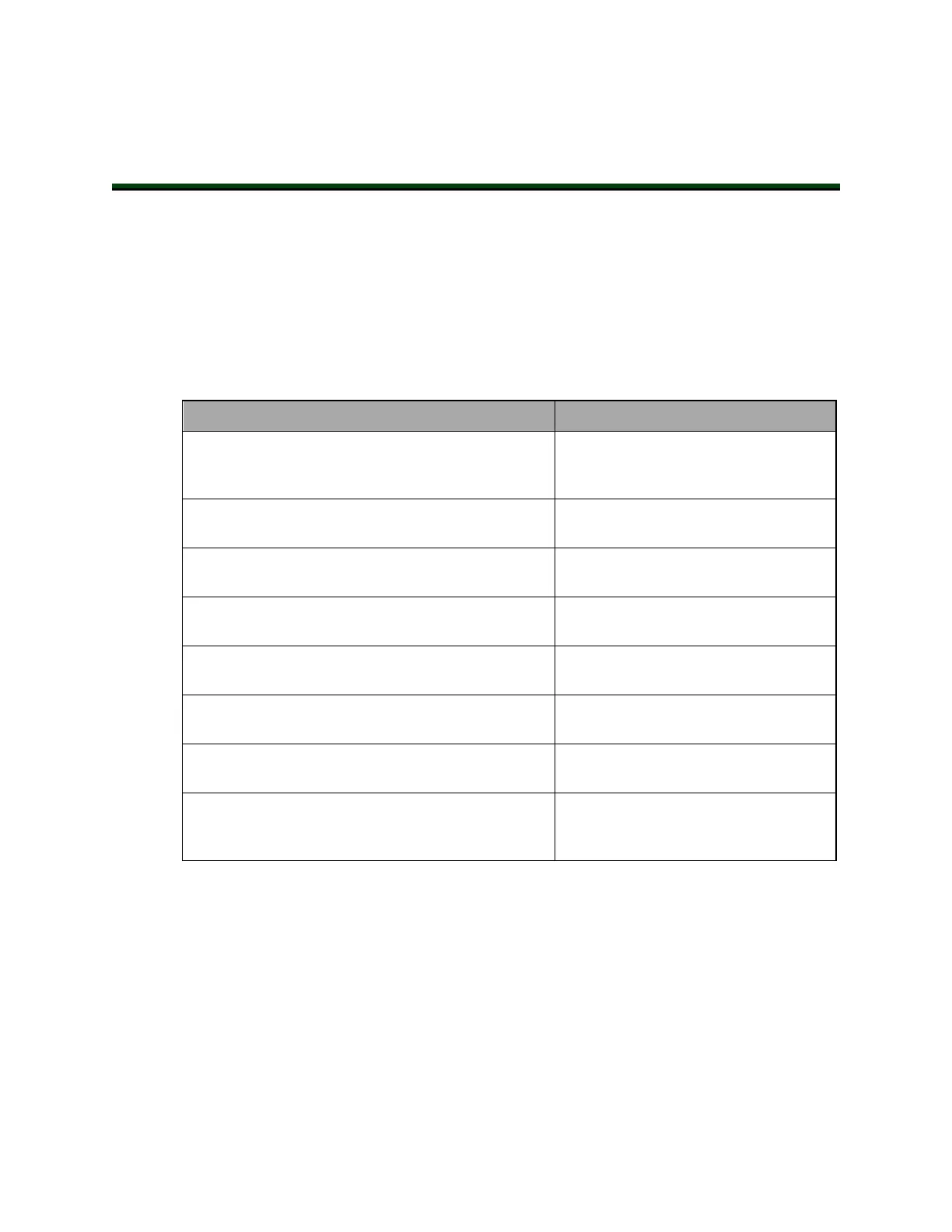
The system installation process is summarized in the following table.
NOTE: For multi-robot installations, see the Single and Multiple Robot Con-
figuration Guide.
Table 3-1. Installation Overview
Task to be Performed Reference Location
Mount the robot to a flat, secure mounting surface. See Mounting an Upright eCobra
Robot on page 27 or Mounting an eCo-
bra 800 Inverted Robot on page 30.
Install the Front Panel, pendant, and ACE software.
The pendant is an option.
See System Installation on page 35.
Create a 24 VDC cable and connect it between the
robot and the user-supplied 24 VDC power supply.
See Connecting 24 VDC Power to
Robot on page 50.
Create a 200-240 VAC cable and connect it between
the robot and the facility AC power source.
See Connecting 200-240 VAC Power to
Robot on page 54.
Install user-supplied safety barriers in the workcell. See Installing User-Supplied Safety
Equipment on page 62.
Learn about connecting digital I/O through the XIO
connector on the eAIB.
See eAIB XIO Connector Signals on
page 86.
Learn about starting the system for the first time. See Starting the System for the First
Time on page 94.
Learn about installing optional equipment, includ-
ing end-effectors, user air and electrical lines,
external equipment, solenoids, etc.
See Optional Equipment Installation
on page 123.
3.2 Transport and Storage
This equipment must be shipped and stored in a temperature-controlled environment, within
the range –25 to +60° C (-13 to +140° F). The recommended humidity range is 5% to 90%, non-
condensing. It should be shipped and stored in the supplied crate, which is designed to pre-
vent damage from normal shock and vibration. You should protect the crate from excessive
shock and vibration.
Use a forklift or pallet jack to transport the packaged equipment. See Figure 3-1.
14402-000 Rev. F eCobra User's Guide 25