Chapter 7: Optional Equipment Installation
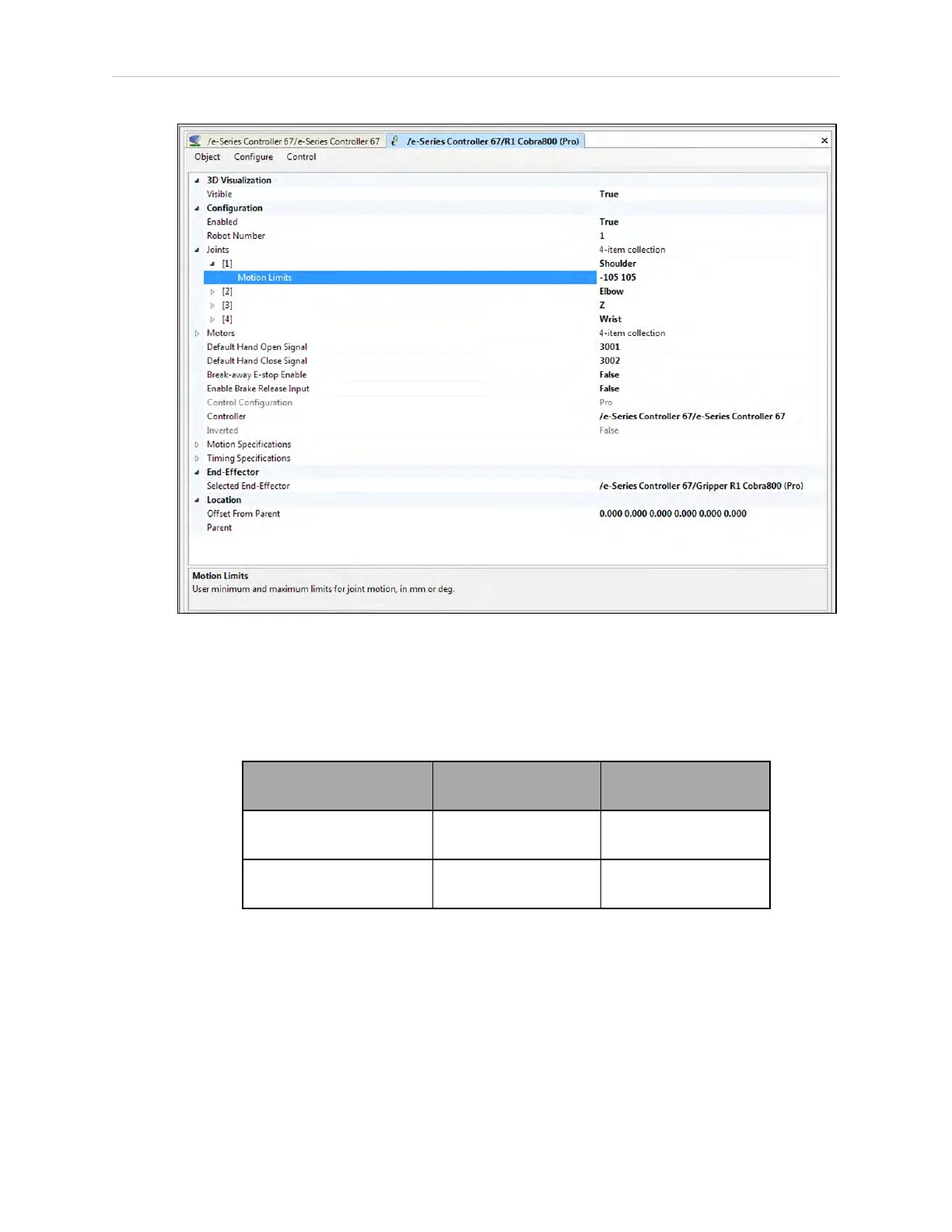
Figure 7-19. Robot Editor, with Joint 1 Expanded
5.
Highlight the current values for joint 1, and replace them with the new values. See the
following table for recommended softstop values for Position 1 or Position 2.
Table 7-19. Joint 1 Ranges for Adjustable Hardstops
Hardstop Value
Recommended
Joint Limit Softstop
J1 Hardstop Position 1 ± 50° Lower limit: – 49°
Upper limit: + 49°
J1 Hardstop Position 2 ± 88° Lower limit: – 87°
Upper limit: + 87°
6.
Reboot eV+:
Controller >Control >Reboot eV+
NOTE: This can also be accomplished by momentarily removing 24 VDC
power from the controller.
The new joint limits will be in effect when the system reboot is done.
14402-000 Rev. F eCobra User's Guide 145