6-48
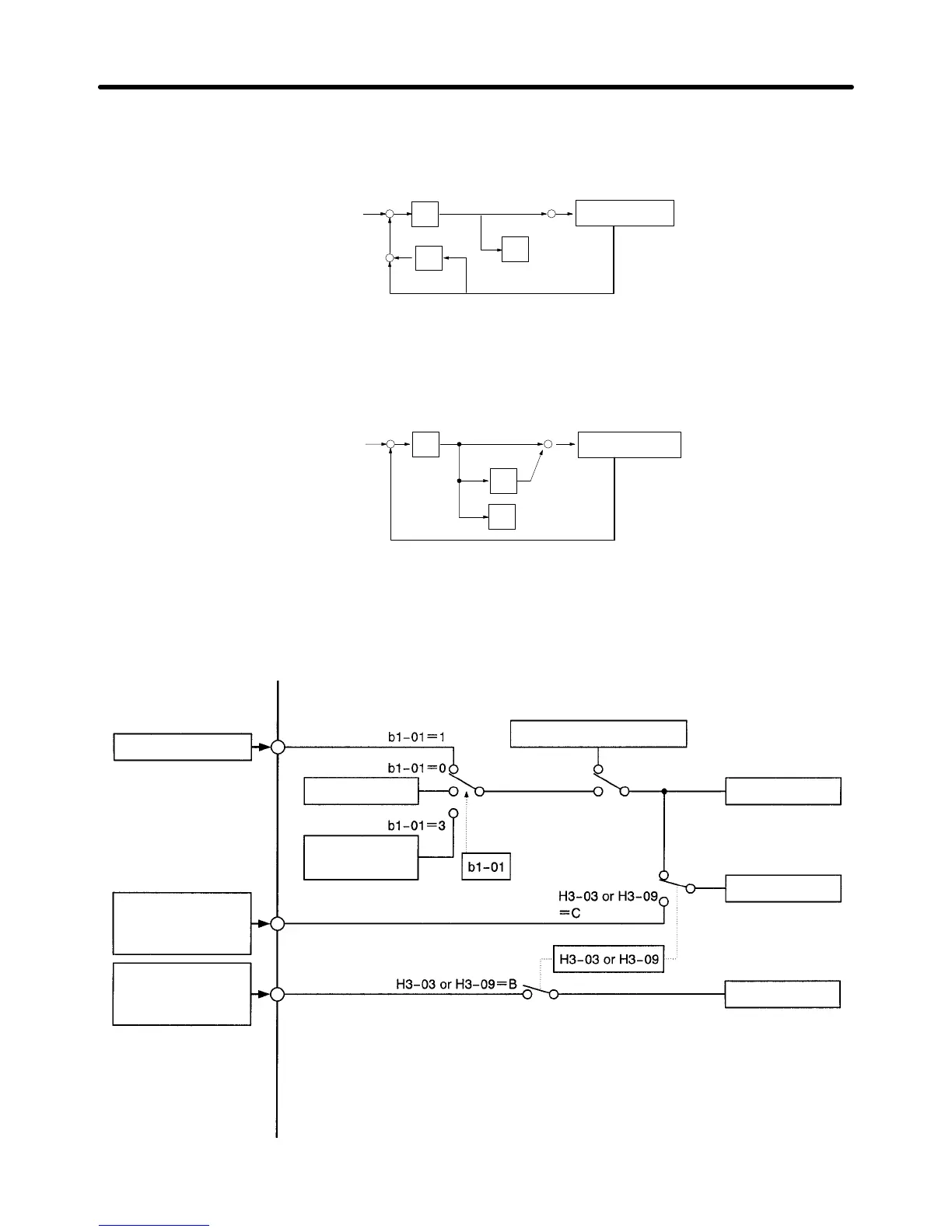
Measured-value Derivative PID Control
With measured-value derivative PID control, the feedback value is differentiated for PID control. Re-
sponse is possible with respect to changes both in target values and the control object.
Target value
Control object
Feedback value
P
D
I
Basic PID Control
This
is the basic form of PID
control. When the D control response is adjusted to follow changes in the
control object, overshooting and undershooting can occur with changes in the target value.
Target value Control object
Feedback value
P
I
D
D Inverter’s PID Control Function
The following illustration is a block diagram of the Inverter’s internal PID control.
Frequency reference input
(voltage)
Multi-function analog
input or frequency ref-
erence input (current)
Multi-function analog
input or frequency ref-
erence input (current)
Frequency reference 1
Frequency reference
from Optional Card
Frequency reference 2 through 8
/Inching frequency
Multi-step reference
Other than H3-03 or
H3-09 set to C
Frequency reference
Target value
Feedback value
Advanced Operation Chapter
6