15-2 Calculations Rexroth IndraDrive
DOK-INDRV*-SYSTEM*****-PR02-EN-P
If the period during which the motor is run at constant speed is
significantly greater than the run-up and braking time, the following
applies:
n21
nn2211
av
t...tt
t*n...t*nt*n
n
++
+++
=
n
av
: average motor speed [min
-1
]
n
1
... n
n
: motor speed [min
-1
]
t
1
... t
n
: duty cycle [s]
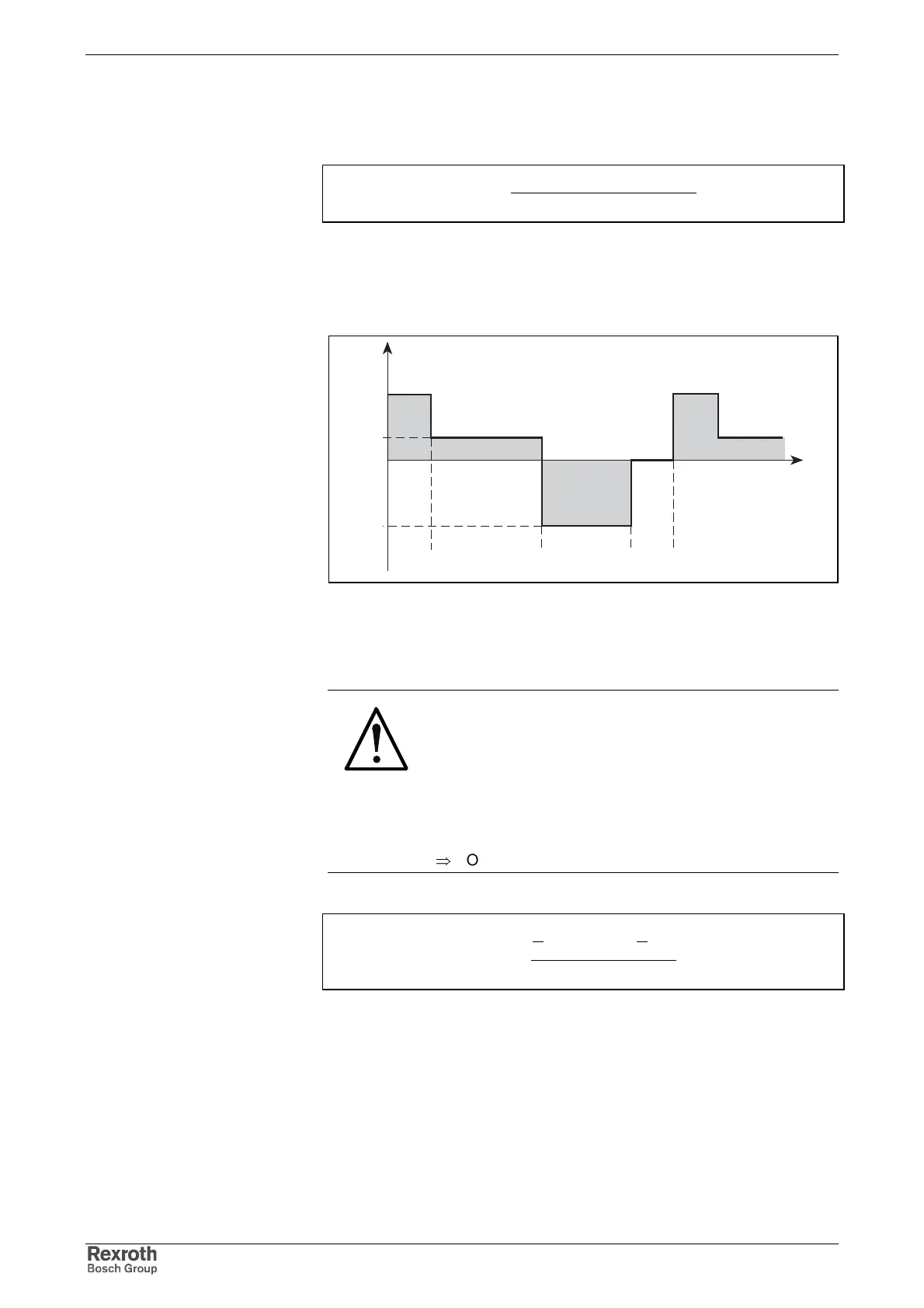
Fig. 15-2: Average speed, effects of run-up and braking times not taken into
account
DGoE.fh7
n
1
n
2
n
3
t
1
t
2
t
3
t
4
t
Fig. 15-3: Speed characteristic; effects of run-up and braking times not taken
into account
In dynamic applications with short cycle times, e.g. roll feeds and nibbling
machines, run-up and braking times must be taken into account.
CAUTION
Damage to the drive controller!
The DC bus capacitors in the drive controller have been
dimensioned for loading with continuous power.
If loaded with cyclic charging and discharging processes
of high energy content, the DC bus capacitors can be
overloaded, especially with decreasing mains connection
voltage.
⇒
Operate additional capacitors at the DC bus.
2B1H
B1H
av
tttt
t*
2
n
t*nt*
2
n
n
+++
++
=
n
av
: average motor speed [min
-1
]
n: motor speed [min
-1
]
t: time [s]
t
H
: run-up time [s]
t
B
: braking time [s]
Fig. 15-4: Average speed; effects of run-up and braking times taken into
account
Average Speed with Run-Up and
Braking Times not Taken into
Account
Average Speed with Run-Up and
Braking Times Taken into
Account