G2: Velocities, setpoint / actual value systems, closed-loop control
7.5 Closed-loop control
Basic Functions
Function Manual, 09/2011, 6FC5397-0BP40-2BA0
375
Fine Interpolation
Using the fine interpolator (FIPO), the contour precision can be further increased by reducing the staircase effect
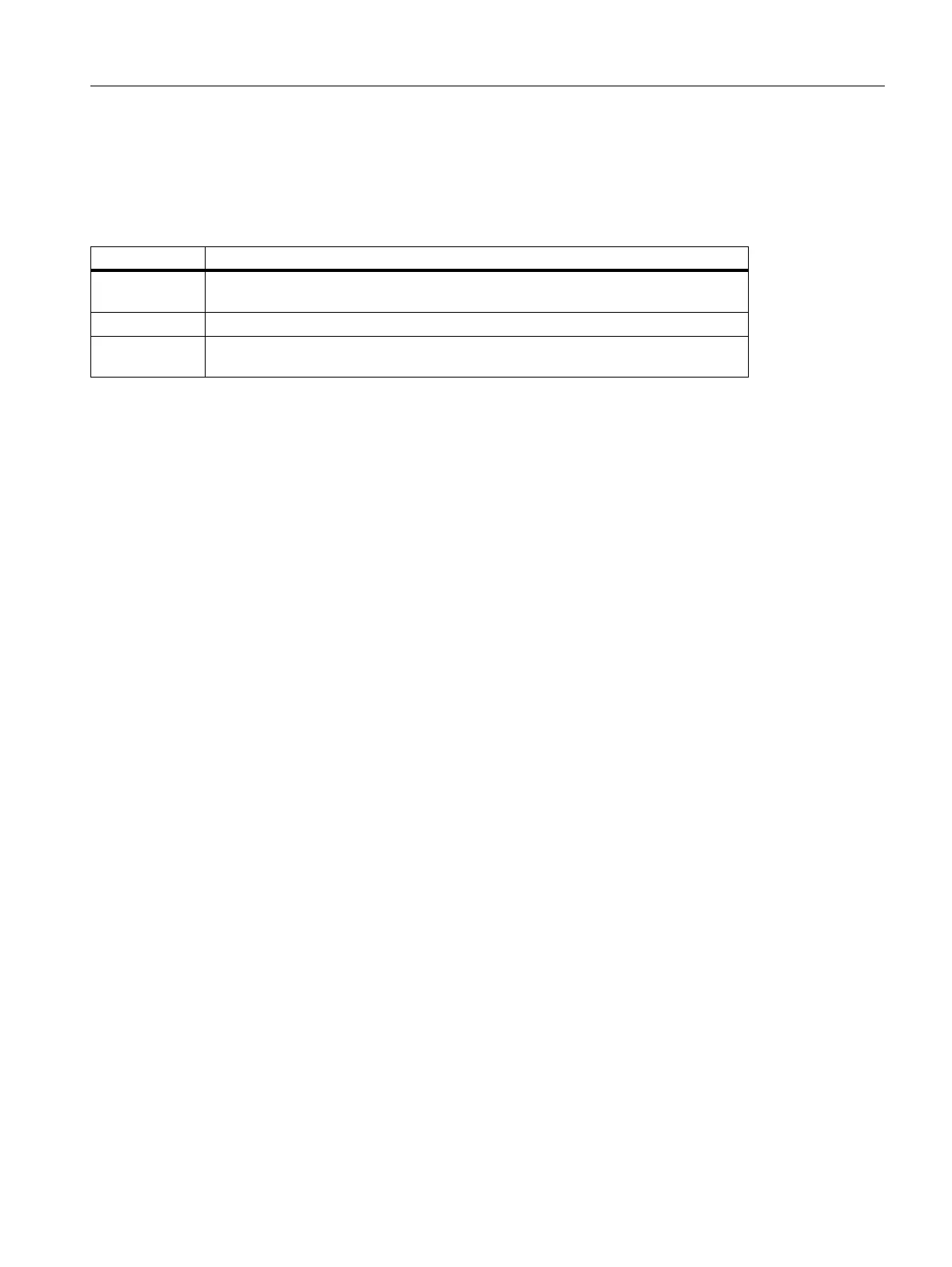
in the speed setpoint. You can set 3 different types of fine interpolation:
MD33000 $MA_FIPO_TYPE = <FIPO mode>
Servo gain factor (K
v
)
In order that few contour deviations occur in the continuous path mode, a high servo gain factor (K
v
) is
necessary:
MD32200 $MA_POSCTRL_GAIN[n]
However, if the servo gain factor (K
v
) is too high, instability, overshoot and possibly impermissibly high loads on
the machine will result.
The maximum permissible servo gain factor (K
v
) depends on the following:
• Design and dynamics of the drive
(rise time, acceleration and braking capacity)
• Machine quality
(elasticity, oscillation damping)
• Position control cycle or speed control cycle for active DSC
The servo gain factor (K
v
) is defined as follows:
<FIPO mode> Meaning
1 Differential fine interpolation with mean value generation (smoothing) over an IPO
cycle
2 Cubic fine interpolation
3 Cubic fine interpolation optimized for use with the pre-control for the highest contour
precision

 Loading...
Loading...














