G2: Velocities, setpoint / actual value systems, closed-loop control
7.5 Closed-loop control
Basic Functions
376 Function Manual, 09/2011, 6FC5397-0BP40-2BA0
Servo gain factor (K
v
) setting for SINUMERIK 840D sl
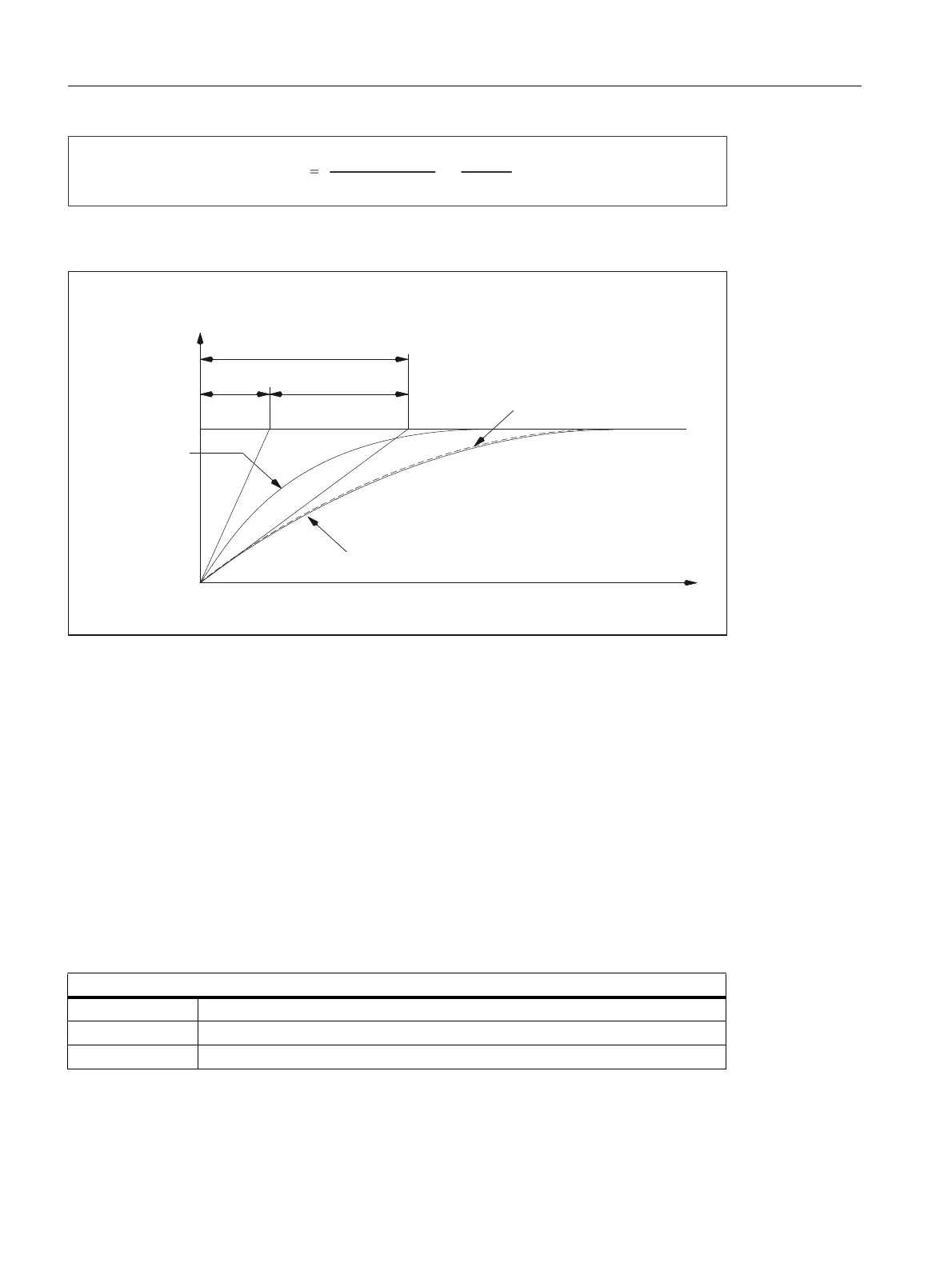
Figure 7-11 Dynamic response adaptation
Dynamic response adaptation
Axes that interpolate with one another, but with different K
v
factors can be set to the same following error using
the dynamic adaptation function. This allows an optimum contour accuracy to be achieved without loss of control
quality by reducing the K
v
factors to the dynamically weakest axis.
The function is activated via:
MD32900 $MA_DYN_MATCH_ENABLE = 1 (dynamic response adaptation)
The dynamic response adaptation is realized by entering a new equivalent time constant. It is calculated from the
difference in the equivalent time constant of the dynamically weakest axis and the axis to be adapted:
MD32910 $MA_DYN_MATCH_TIME [n] = <difference in the equivalent time constant>
Example of a dynamic response adaptation of 3 axes without speed precontrol
With an equivalent time constant of 30 ms, axis 1 is the dynamically weakest axis.
This results in the following new equivalent time constants for the axes:
The equivalent time constant of the position control loop is:
Axis 1: 30 ms
Axis 2: 20 ms
Axis 3: 24 ms
9HORFLW\
)ROORZLQJHUURU
>PPLQ@
.9
>PP@
W
'<1B0$7&+B7,0(
$[LV>$[LV@
$[LVZLWKKLJKVHUYRJDLQDQG
G\QDPLFUHVSRQVHDGDSWDWLRQ
$[LVHTXLYWLPH
6WHSUHVSRQVHRI
WKHSRVLWLRQFRQWURO
ORRS
$[LVZLWKKLJK
VHUYRJDLQ
$[LVZLWKORZVHUYRJDLQ
(TXLYWLPH

 Loading...
Loading...














