K2: Axis Types, Coordinate Systems, Frames
10.5 Frames
Basic Functions
726 Function Manual, 09/2011, 6FC5397-0BP40-2BA0
Parameterization
The corresponding rotation in frame is parameterized through the machine data:
MD10600 $MN_FRAME_ANGLE_INPUT_MODE (rotation sequence in FRAME)
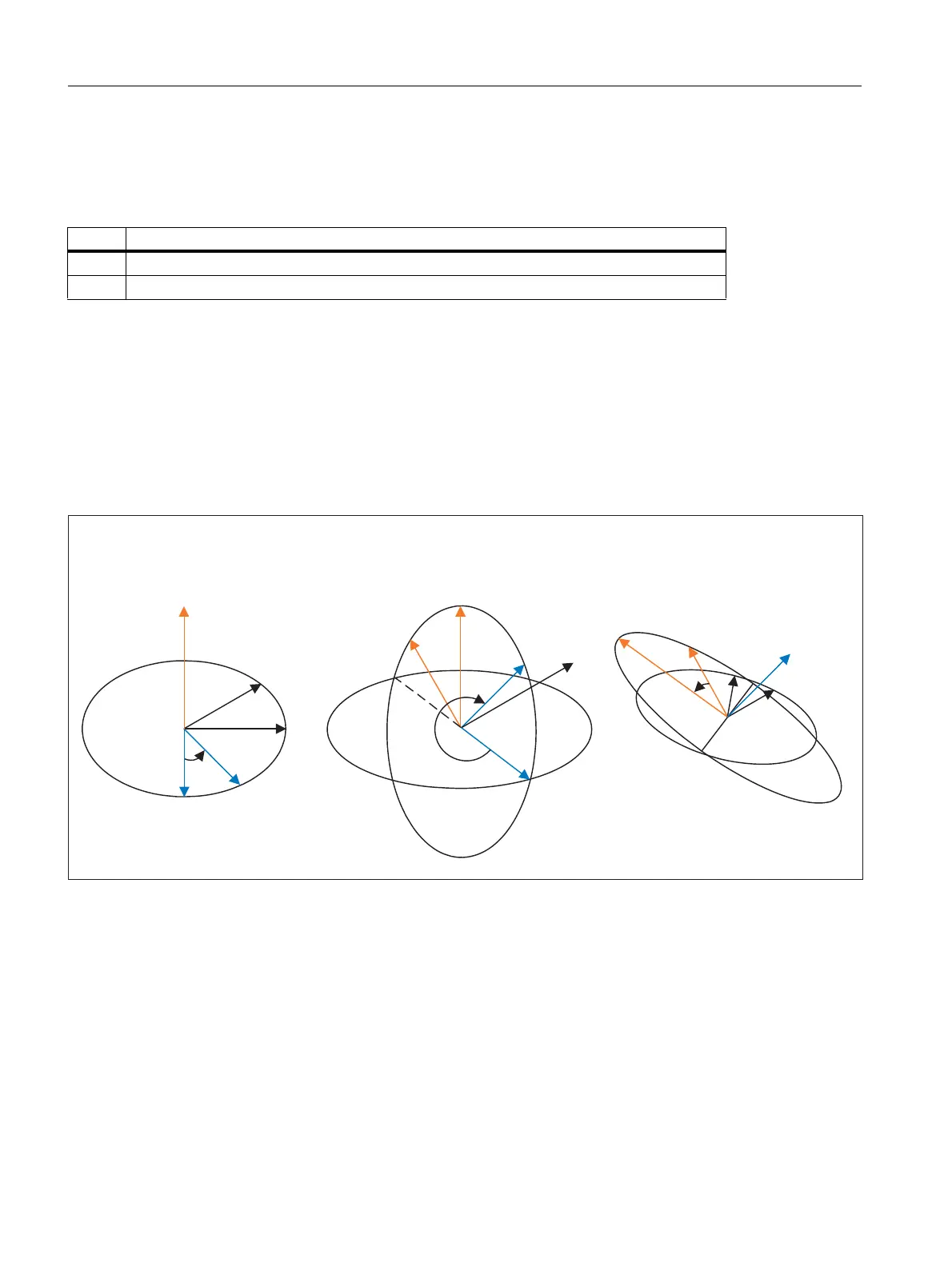
RPY
RPY is derived from the English:
Rotations with a RPY angle are carried out in the order Z, Y', X''.
Data from RPY angles can only be unambiguously calculated back from the following value ranges:
For data outside the specified value ranges, a modulo conversion is made referred to the value of the particular
range limit.
Value Meaning
1 RPY notation
2 Euler angle
R: Roll → rotation around X
P: Pitch → rotation around Y
Y: Yaw → rotation around Z
-180 <= x <= 180
-90 < y < 90
-180 <= z <= 180
[ [
\
\
]
]
[
[
]
]
\ \
[
[
\
\
] ]
5RWDWLRQDERXW]
5RWDWLRQDERXW\
5RWDWLRQDERXW[

 Loading...
Loading...














