K2: Axis Types, Coordinate Systems, Frames
10.5 Frames
Basic Functions
Function Manual, 09/2011, 6FC5397-0BP40-2BA0
727
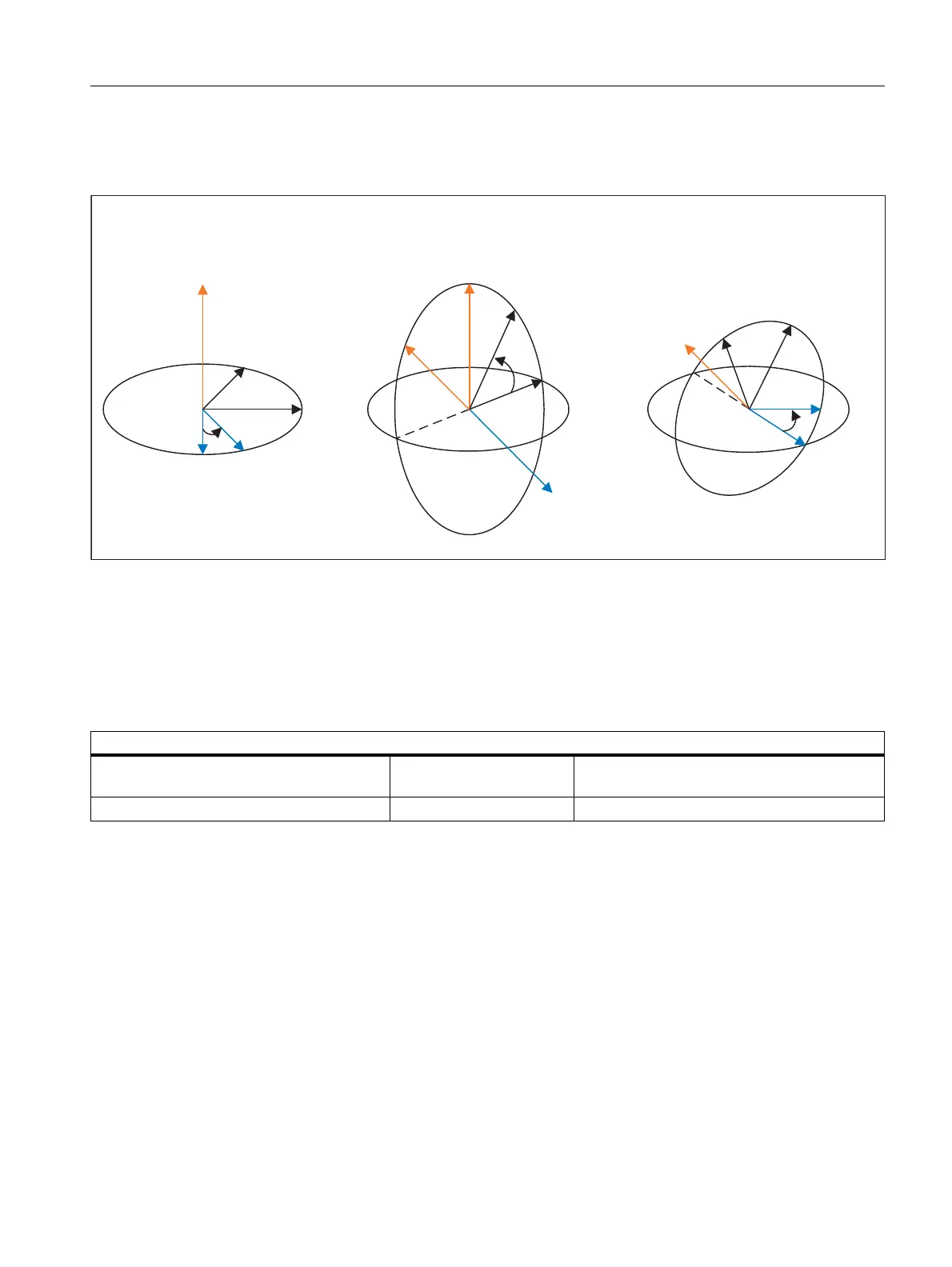
Euler angle
Rotations with a Euler angle are carried out in the order Z, X', Z''.
Data from Euler angles can only be unambiguously calculated back within the following value ranges:
For data outside the specified value ranges, a modulo conversion is made referred to the value of the particular
range limit.
On writing and reading frame rotation components, these limits should be observed so the same results are
achieved on writing and reading, or on repeated writing.
Programming
The program commands below are used to program the rotation:
$P_UIFR[1]=CROT(x,10,y,10)
ROT x=10 y=10
$P_UIFR[1,x,rt]=10
0 <= x < 180
-180 <= y <= 180
-180 <= z <= 180
RPY example
$P_UIFR[1]=crot(x,10,y,90,z,40)
returns when reading
back:
$P_UIFR[1]=crot(x,0,y,90,z,30)
$P_UIFR[1]=crot(x,190,y,0,z,-200)
supplies when reading:
$P_UIFR[1]=crot(x,-170,y,0,z,160)
5RWDWLRQDERXW]
5RWDWLRQDERXW[ 5RWDWLRQDERXW]
[
[
\
\
]
\
[ [
]
\
]
[
[
\
\
] ]

 Loading...
Loading...














