87
Model Code Page
31. Σ --- p o w e r
1. 9. 2002
8750, 8950 313 2A
1. 10. 1999
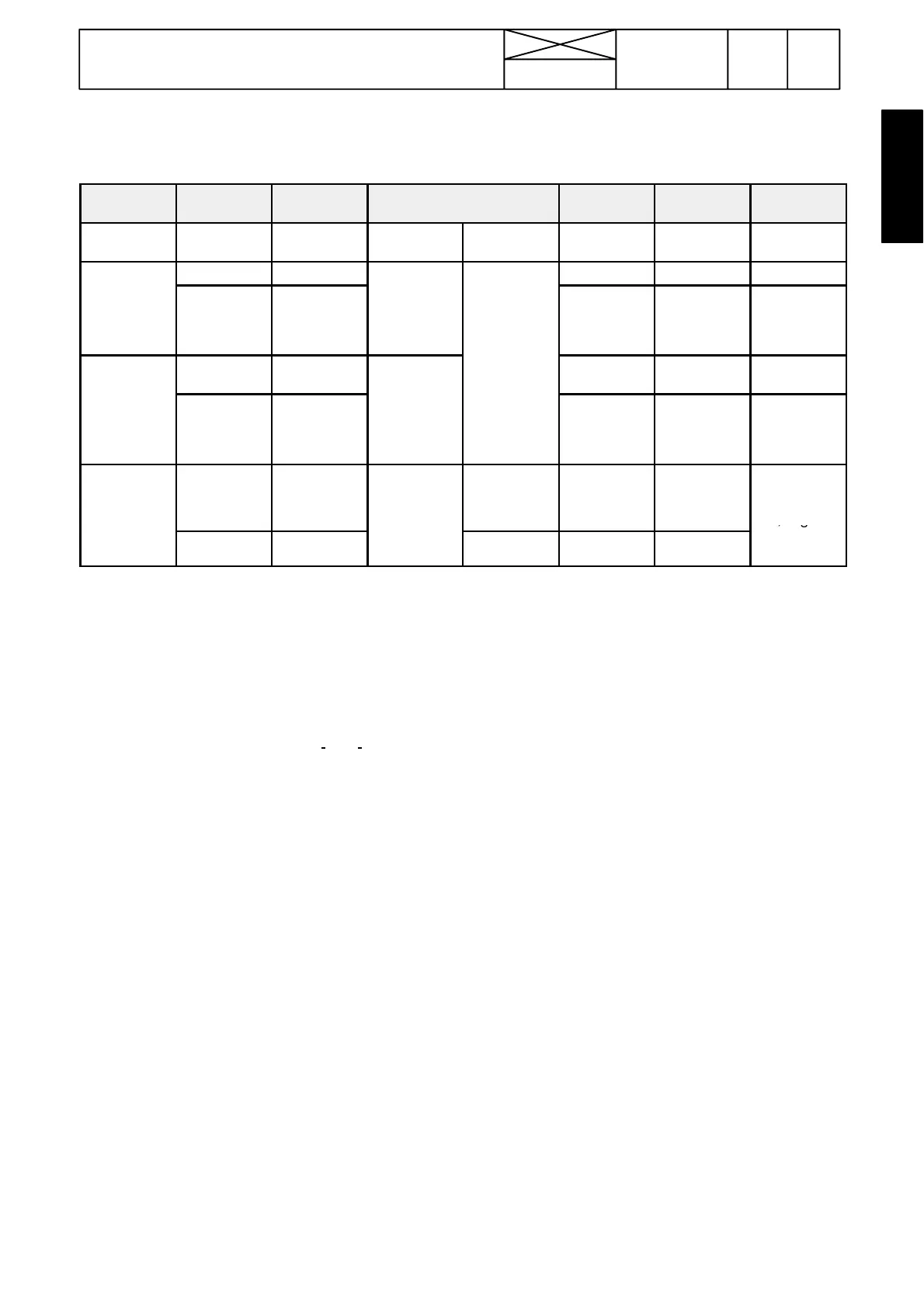
Version markings of SigmaPower
(see picture on page 313/2)
S i g m a --- v e r -
sion
Tractor Used in pro-
duction
Sigma control unit A13,
part number
Sensors B4
and B5
Wire loom Modificati-
ons
In producti-
on.
As a spare
part.
1.0 8750 ---G04413 330 538 00 34 008 000 330 545 00 330 262 00 ---
8750 G04414 --- 330 545 00 330 262 00 Engaging li-
mit lowered
520 Nm --->
350 Nm.
1.1 8750 G22507 --- 330 538 10 330 545 10 330 262 10 Tight con-
nector s.
8750 H02431--- 330 545 10 330 262 10 Sensor B4
placed on
flywheel hou-
sing.
2.0 8950Hi H49112 ---K02
116 ja
K05209 ---
336 730 00 34 008 100 330 545 10 336 839 00 New control
unit, enga-
ging limit 400
Nm, enga-
8750 J20107--- 34 008 000 330 545 10 336 839 00
ging delay
0,5 seconds.
Sigma power 2.0
In the tractor production Sigma 2.0 is fixed on 8950Hi and on 8750 tractors.
Max. engine power output: 8950hi: 160 / 200 hp. 8750: 160 / 190 hp
Sigma engages at a torque of about 400 nm (350---450 Nm)
--- measured at pto shaft; ac display shows 35---40 %
Sigma disengaging limit is about 50 nm
lower than the engaging to r que limit
Engaging delay is 0.5 seconds (= over 400 nm min. 0.5 sec.)
Disengaging delay is 5 seco nds (= below 350 nm min. 5 s ec.)
The function of the 2.0 system is more accurate than earlier versions due to:
--- new electronics and programs in the control unit
--- zero calibration is made only with high engine speed modificated fault codes
--- easier to check which s ensor (b4 or b5) is faulty or wrongly adjusted
“Zero” calibratio n have to be done after repairs of pto and after fixing a new contro l unit
--- disengage pto (lever & switch) > start the engine > keep engine speed at 1600 rpm 25…30 seconds > zero calibration
value is saved in the memory automatically > ac display shows 0---2 %
--- the zero calibration value is automatically determined and saved to memory every time when engine speed has been over
1500 rpm over 5 seconds (pto lever in off ---position)
--- the control unit uses always the latest zero calibration value in the memory (the value is kept in memory also when starte r
switch is switched to stop position)