5.2 b: Application
140 YASKAWA ELECTRIC SIEP C710616 27C YASKAWA AC Drive A1000 Technical Manual
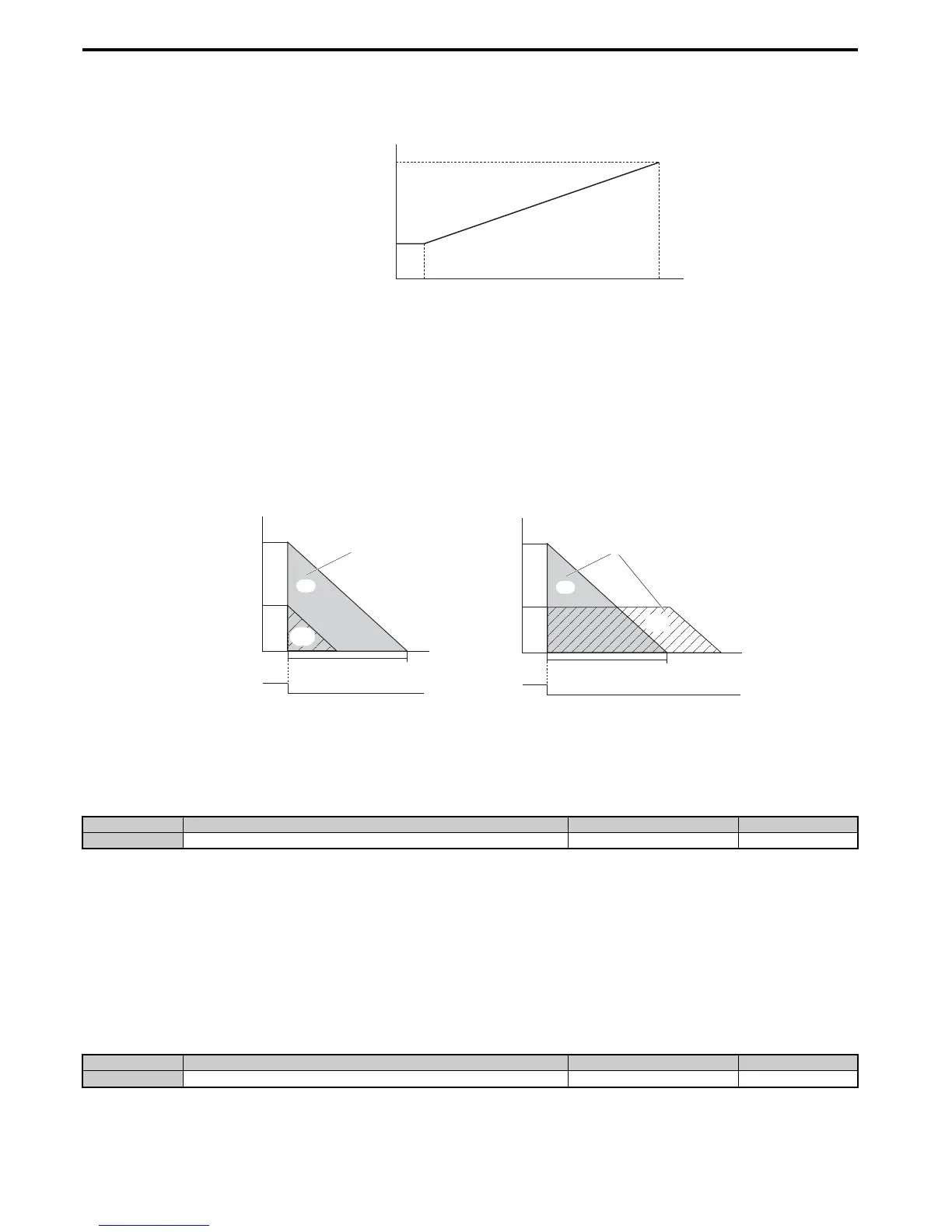
The wait time t is determined by the output frequency when the Run command is removed and by the active deceleration
time.
Figure 5. 7
Figure 5.7 Run Wait Time Depending on Output Frequency
Setting 9: Simple Positioning Stop
This method of stopping the motor always decelerates the same distance to stop as shown in Figure 5.8. The stopping
distance S1 is calculated using the maximum output frequency setting E1-04 and the selected deceleration time. If the
drive is stopped from a frequency lower than the maximum speed it keeps the current speed. When the distance traveled
becomes equal to S1 - S2, the drive decelerates to stop using the current deceleration time. The stopping accuracy can be
adjusted using the positioning gain set in parameter d4-12.
Figure 5. 8
Figure 5.8 Simple Positioning Deceleration
■ b1-04: Reverse Operation Selection
For some applications, reverse motor rotation is not appropriate and may cause problems (e.g., air handling units, pumps,
etc.). Setting parameter b1-04 to 1 instructs the drive to ignore any Reverse run commands.
Setting 0: Reverse operation enabled
Possible to operate the motor in both forward and reverse directions.
Setting 1: Reverse operation disabled
Drive disregards a Reverse run command or a negative frequency reference.
■
b1-05: Action Selection below Minimum Output Frequency (CLV and CLV/PM)
Parameter b1-05 sets the operation when the frequency reference is lower than the minimum output frequency set in
parameter E1-09.
No. Parameter Name Setting Range Default
b1-04 Reverse Operation Selection 0 or 1 0
No. Parameter Name Setting Range Default
b1-05 Action Selection below Minimum Output Frequency 0 to 3 0
Min output
frequency
100%
(Max output
frequency)
Output frequency
when Stop command
was entered
Run wait time t
Active deceleration time
Min Baseblock Time (L2-03)
Max. output
frequency
Deceleration
distance
S1
S1
Set deceleration time
Motor speed
t
Run command
Max. output
frequency
Deceleration
distance
S1
Set deceleration time
Motor speed
t
Run command
S2
Normal Deceleration
Simple Positioning

 Loading...
Loading...












