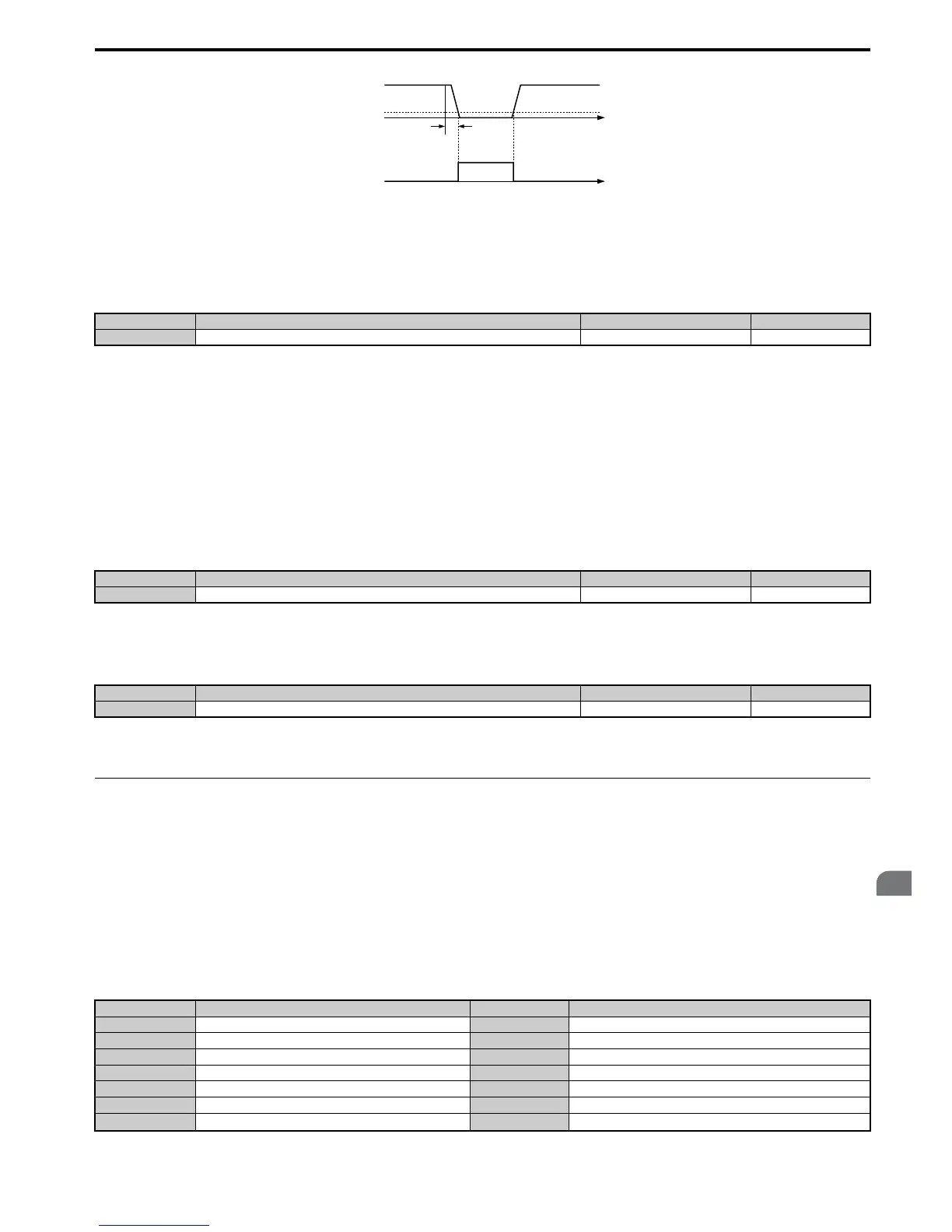
Figure 5.1 00
Figure 5.100 Loss of Reference Function
To have a digital output trigger when frequency reference loss occurs, set H2-01, H2-02, or H2-03 to C. Refer to Setting
C: Frequency reference loss on page 228 for details on setting the output function.
Parameter L4-05 selects the operation when a frequency reference loss is detected.
Setting 0: Stop
Drive follows the frequency reference (which is no longer present) and simply stops the motor.
Setting 1: Continue operation with reduced frequency reference
The drive will continue operation at the frequency reference value set in parameter L4-06. When the external frequency
reference value is restored, the operation is continued with the frequency reference.
■
L4-06: Frequency Reference at Reference Loss
Sets the frequency reference level the drive runs with when L4-05 = 1 and a reference loss was detected. The value is set
as a percentage of the frequency reference before the loss was detected.
■
L4-07: Speed Agreement Detection Selection
Determines when frequency detection is active using parameters L4-01 through L4-04.
Setting 0: No detection during baseblock
Setting 1: Detection always enabled
◆ L5: Fault Restart
After a fault has occurred, this function attempts to automatically restart the motor and continue operation instead of
stopping.
The drive can be set up to perform a self-diagnostic check and resume the operation after a fault has occurred. If the self-
check is successful and the cause of the fault has disappeared, the drive restarts by first performing Speed Search (Refer
to b3: Speed Search on page 146 for details).
DANGER! Never use the fault restart function in hoist-type applications.
The drive can attempt to restart itself following the faults listed below.
No. Name Setting Range Default
L4-05 Frequency Reference Loss Detection Selection 0 or 1 0
No. Name Setting Range Default
L4-06 Frequency Reference at Reference Loss 0.0 to 100.0% 80.0%
No. Name Setting Range Default
L4-07 Speed Agreement Detection Selection 0 or 1 0
Fault Name Fault Name
GF Ground Fault oL4 Overtorque 2
LF Output Open Phase ov DC Bus Overvoltage
oC Overcurrent PF Input Phase Loss
oH1 Drive Overheat rH Braking Resistor Fault
oL1 Motor Overload rr Braking Transistor Fault
oL2 Drive Overload Uv1
<1> When L2-01 is set to 1 through 4 (continue operation during momentary power loss)
DC Bus Undervoltage <1>
oL3 Overtorque 1
Sto
Pull-Out Detection

 Loading...
Loading...












