5.2 b: Application
162 YASKAWA ELECTRIC SIEP C710616 27C YASKAWA AC Drive A1000 Technical Manual
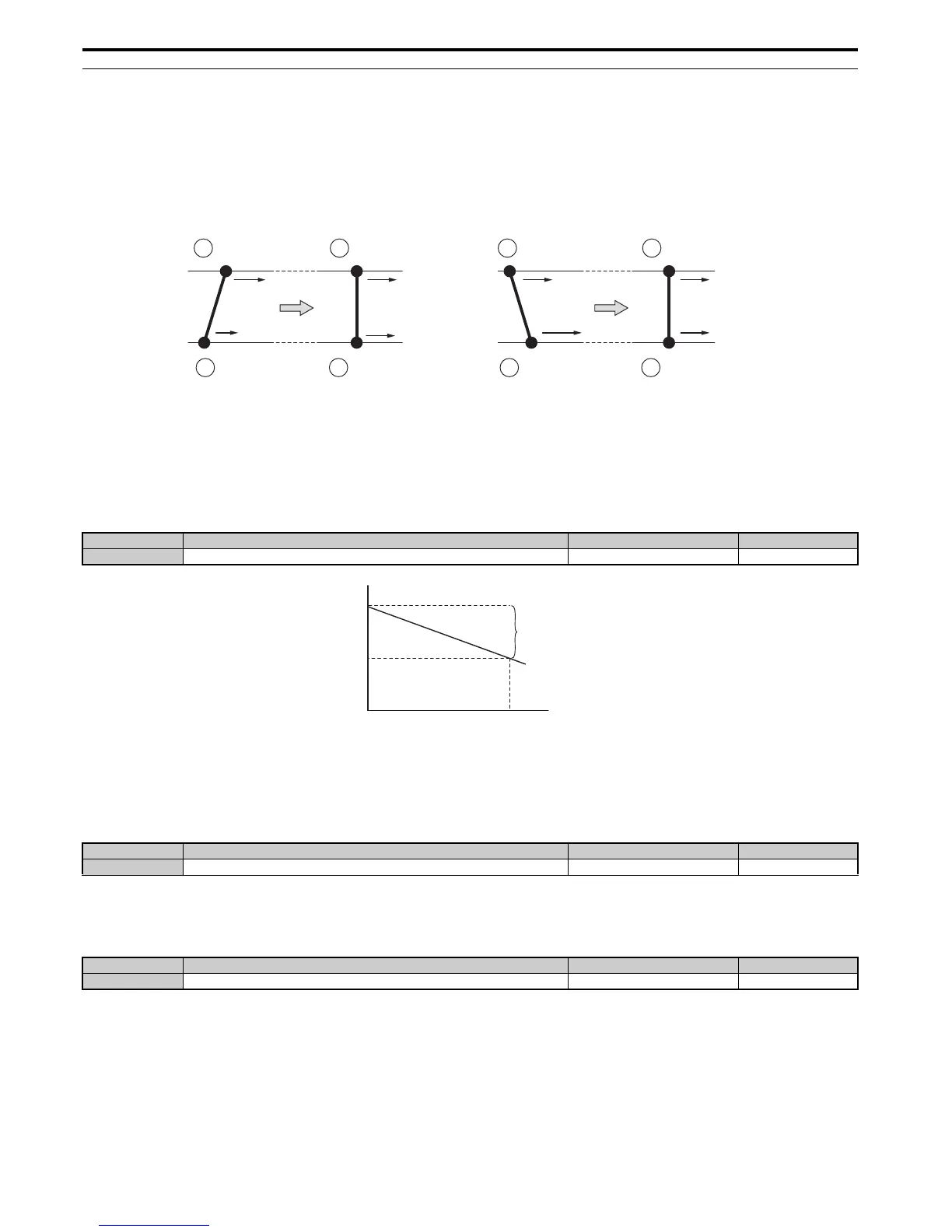
◆ b7: Droop Control (CLV, CLV/PM)
Droop control can automatically balance the load level between two motors that drive the same load, such as in traverse
cranes applications. It must be activated in one of the two drives that control these motors. The drive in which Droop
control is activated will automatically reduce the speed if the torque reference rises, and increase the speed if the torque
reference falls again, thereby shifting the load from one motor to the other.
Note: Disable Feed Forward (n5-01 = 0) whenever using Droop control.
Figure 5. 27
Figure 5.27 Droop Control in a Traverse Application
■ b7-01: Droop Control Gain
Sets the amount of speed reduction when the torque reference is 100%. The gain is set as a percentage of the maximum
output frequency. A setting of 0.0% disables the Droop control function.
Figure 5. 28
Figure 5.28 Droop Control Gain
■ b7-02: Droop Control Delay Time
The setting in b7-02 adjusts the responsiveness of Droop control. Reduce the setting if the reaction time is too long, and
increase it if hunting occurs.
■
b7-03: Droop Control Limit Selection
Enables or disables the droop control limit.
Setting 0: Disabled
Setting 1: Enabled
No. Parameter Name Setting Range Default
b7-01 Droop Control Gain 0.0 to 100.0% 0.0%
No. Parameter Name Setting Range Default
b7-02 Droop Control Delay Time 0.03 to 2.00 s 0.05 s
No. Parameter Name Setting Range Default
b7-03 Droop Control Limit Selection 0, 1 1
B
A
= 90% Load
= 90% Load
B
A
= 100% Load
= 80% Load
Droop Control increases the speed reference in
drive B accomplishing load balance
B
A
= 80% Load
= 100% Load
B
A
= 90% Load
= 90% Load
f
ref_A
= constant
f
ref_A
= constant
f
ref_B
increase f
ref_B
decrease
Droop Control decreases the speed reference in
drive B accomplishing load balance
Motor A runs faster than B, pulling more load Motor B runs faster than A, pulling more load

 Loading...
Loading...












