296 YASKAWA ELECTRIC SIEP C710616 27C YASKAWA AC Drive A1000 Technical Manual
6.2 Motor Performance Fine-Tuning
6.2 Motor Performance Fine-Tuning
This section offers helpful information for counteracting oscillation, hunting, or other problems that occur while
performing a trial run. Refer to the section below that corresponds to the motor control method used.
Note: This section describes parameters that are commonly edited and may be set incorrectly. Consult Yaskawa for more information
on detailed settings and fine-tuning the drive.
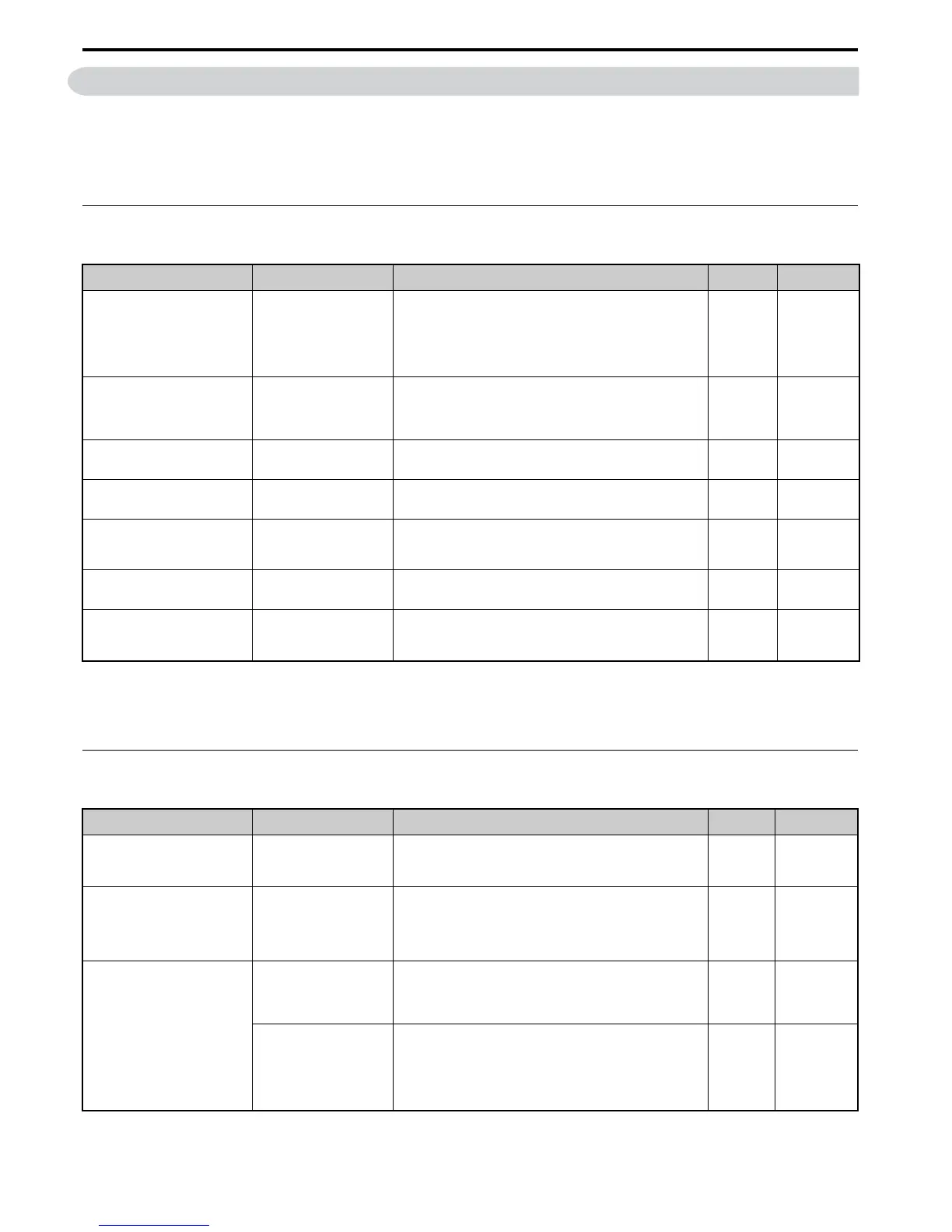
◆ Fine-Tuning V/f Control and V/f Control with PG
Table 6.1 Parameters for Fine-Tuning Performance in V/f and V/f w/PG
◆ Fine-Tuning Open Loop Vector Control
Table 6.2 Parameters for Fine-Tuning Performance in OLV
Problem
<1> Default setting value is dependent on parameter A1-02, Control Method Selection, and o2-04, Drive Model Selection.
<2> Default settings change when the Control Method is changed (A1-02) or a different V/f pattern is selected using parameter E1-03.
<3> ASR in V/f Control with PG only controls the output frequency, and therefore does not allow the high gain settings possible when using Close
Loop Vector control.
<4> Refer to C5: Automatic Speed Regulator (ASR) on page 171 for details on Automatic Speed Regulator (ASR).
Parameter No. Corrective Action Default
Suggested
Setting
Motor hunting and oscillation at speeds
between 10 and 40 Hz
Hunting Prevention Gain
(n1-02)
• If insufficient motor torque relative to the size of the load causes hunting,
reduce the setting.
• When motor hunting and oscillation occur with a light load, increase the
setting.
• Lower this setting if hunting occurs when using a motor with a relatively
low inductance, such as a high-frequency motor or a motor with a larger
frame size.
1.00 0.10 to 2.00
• Motor noise
• Motor hunting and oscillation at
speeds up to 40 Hz
Carrier Frequency Selection
(C6-02)
• If the motor noise is too loud, increase the carrier frequency.
• When motor hunting and oscillation occur at speeds up to 40 Hz, lower
the carrier frequency.
• The default setting for the carrier frequency depends on the drive
capacity (o2-04) and the Duty Selection (C6-01).
1 (2 kHz) 1 to max. setting
• Poor torque or speed response
• Motor hunting and oscillation
Torque Compensation Primary
Delay Time
(C4-02)
• If motor torque and speed response are too slow, decrease the setting.
• If motor hunting and oscillation occur, increase the setting.
200 ms
<1> 100 to 1000 ms
• Poor motor torque at speeds below 10
Hz
• Motor hunting and oscillation
Torque Compensation Gain
(C4-01)
• If motor torque is insufficient at speeds below 10 Hz, increase the setting.
• If motor hunting and oscillation with a relatively light load, decrease the
setting.
1.00 0.50 to 1.50
• Poor motor torque at low speeds
• Motor instability at motor start
Mid Output Voltage A (E1-08)
Minimum Output Voltage
(E1-10)
• If torque is insufficient at speeds below 10 Hz, increase the setting.
• If motor instability occurs at motor start, decrease the setting.
Note: The recommended setting value is for 200 V class drives. Double this
value when using a 400 V class drive.
E1-08: 15.0 V
E1-10: 9.0 V
<2>
Default setting
±5 V
Poor speed precision (V/f control)
Slip Compensation Gain
(C3-01)
After setting the motor-rated current (E2-01), motor-rated slip (E2-02), and
motor no-load current (E2-03), adjust the slip compensation gain (C3-01).
0.0
(no slip
compensation)
0.5 to 1.5
Poor speed precision (V/f control with
PG)
ASR Proportional Gain 1 (C5-01)
ASR Integral Time 1 (C5-02)
<3> <4>
Adjust the ASR proportional gain 1 (C5-01) and the ASR integral time 1
(C5-02).
C5-01: 0.20
C5-02: 0.200
Proportional gain
= 0.10 to 1.00
Integral time
= 0.100 to 2.000
Problem Parameter No. Corrective Action Default
Suggested
Setting
• Poor motor torque and speed
response
• Motor hunting and oscillation at
speeds between 10 and 40 Hz
AFR Gain
(n2-01)
• If motor torque and speed response are too slow, gradually decrease the
setting by 0.05.
• If motor hunting and oscillation occur, gradually increase the setting by
0.05.
1.00 0.50 to 2.00
• Poor motor torque and speed
response
• Motor hunting and oscillation at
speeds between 10 and 40 Hz
AFR Time Constant 1
(n2-02)
• To improve motor torque speed response, gradually reduce this setting by
10 ms and check the performance.
• If motor hunting and oscillation occur as a result of load inertia, gradually
increase the setting by 50 ms and check the performance.
Note: Ensure that n2-02 ≤ n2-03. When changing n2-02, set C4-02 (Torque
Compensation Primary Delay Time Constant 1) accordingly.
50 ms 50 to 2000 ms
Overvoltage trips when accelerating,
decelerating, or during sudden speed or
load changes.
AFR Time Constant 2
(n2-03)
• If overvoltage occur, gradually increase this setting by 50 ms.
• If response is slow, gradually reduce this setting by 10 ms.
Note: Ensure that n2-02 ≤ n2-03. When making adjustments to n2-03,
increase the value of C4-06 (Torque Compensation Primary Delay Time 2)
proportionally.
750 ms 750 to 2000 ms
Torque Compensation Primary
Delay Time Constant 2 (C4-06)
• If overvoltage trips occur, gradually increase this setting by 10 ms and
check the performance.
• If response is slow, gradually reduce this setting by 2 ms and check the
performance.
Note: Ensure that C4-02 ≤ C4-06. When changing C4-06 (Torque
Compensation Primary Delay Time Constant 2), increase the value of n2-03
proportionally.
150 ms 150 to 750 ms

 Loading...
Loading...












