◆ n5: Feed Forward Control
Enabling Feed Forward can improve the drives responsiveness to speed reference changes in applications where a high
speed control proportional gain setting (ASR gain, C5-01, C5-03) would lead to problems with overshoot, undershoot, or
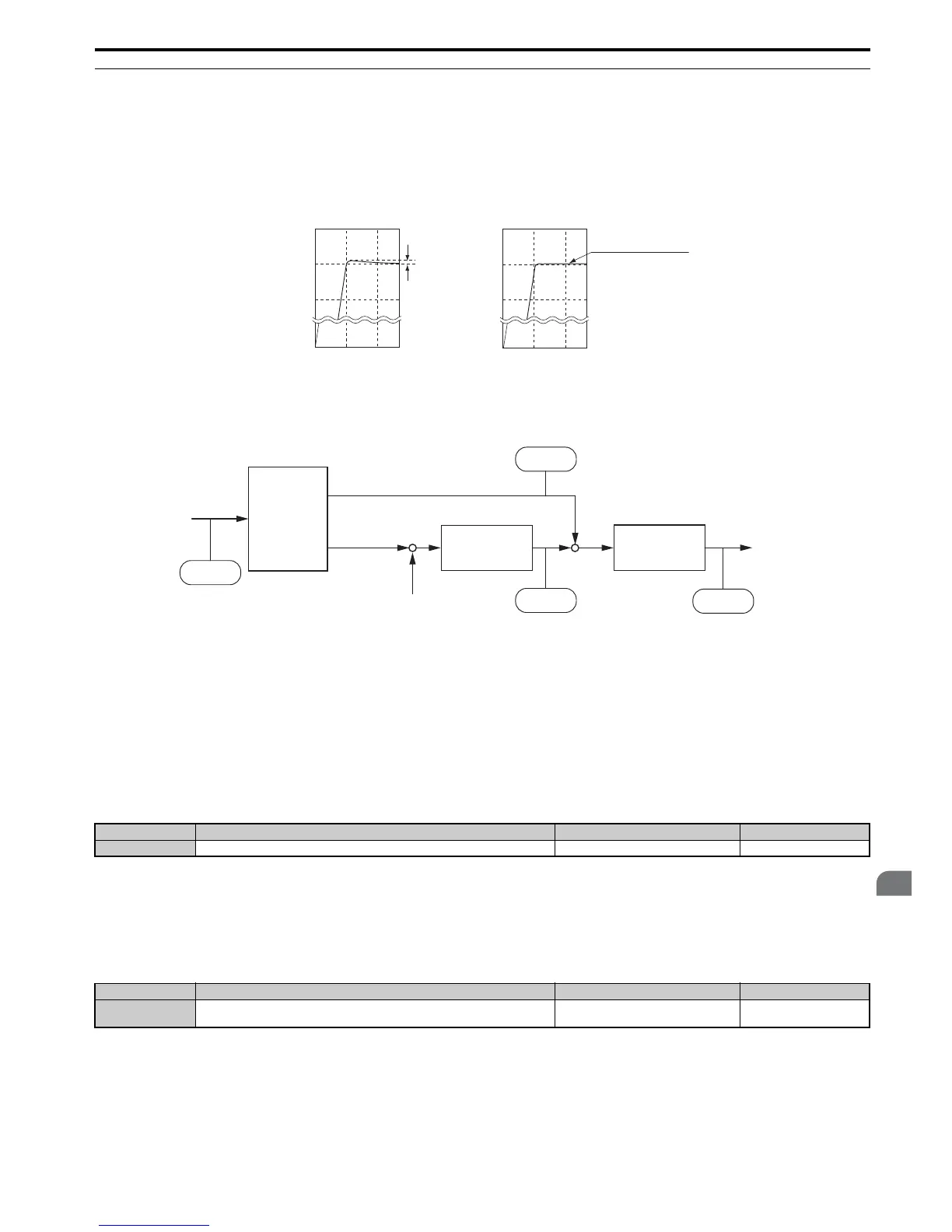
oscillation. Figure 5.105 gives an example of overshoot reduction by Feed Forward. Parameters related to this function
and the function principle are illustrated in Figure 5.106. Feed Forward can only be used in Closed Loop Vector Control
for induction or PM motors (A1-02 = 4 or 7), or in Advanced Open Loop Vector Control for PM motors (A1-02 = 6).
Figure 5.1 05
Figure 5.105 Overshoot Suppression by Feed Forward Control
Figure 5.1 06
Figure 5.106 Feed Forward Control
Note: 1. Feed Forward can only be used in CLV, AOLV/PM, and CLV/PM control modes.
2. Prior to using Feed Forward, always perform Auto-Tuning or set the correct motor data manually. Also perform ASR Auto-Tuning to
set the speed loop gain (C5-01), or adjust it manually. Fine-tune the other speed control loop parameters (C5-) if required.
3. If not restricted by the application, use Inertia Auto Tuning (T1-01 = 8) to have the drive automatically optimize Feed Forward
parameters. If Inertia Auto Tuning cannot be performed, parameters related to Feed Forward should be set manually.
■ n5-01: Feed Forward Control Selection
Enables to disables the Feed Forward function.
Setting 0: Disabled
Setting 1: Enabled
■ n5-02: Motor Acceleration Time
Sets the time required to accelerate the motor from a full stop up to the rated speed at the rated torque.
This value can be set automatically by Inertia Auto-Tuning. If Inertia Auto-Tuning cannot be performed, use one of the
methods below to determine the setting value for this parameter.
No. Name Setting Range Default
n5-01 Feed Forward Control Selection 0 or 1 0
No. Parameter Name Setting Range Default
n5-02 Motor Acceleration Time 0.001 to 10.000 s
Determined by C6-01,
E5-01 and o2-04

 Loading...
Loading...












