■ PID Setpoint Input Methods
The PID setpoint input depends on the PID function setting in parameter b5-01.
If parameter b5-01 is set to 1 or 2, the frequency reference in b1-01 (or b1-15) or one of the inputs listed in Tabl e 5.8
becomes the PID setpoint.
If b5-01 is set to 3 or 4, then the PID setpoint can be input from one of the sources listed in Tabl e 5.8.
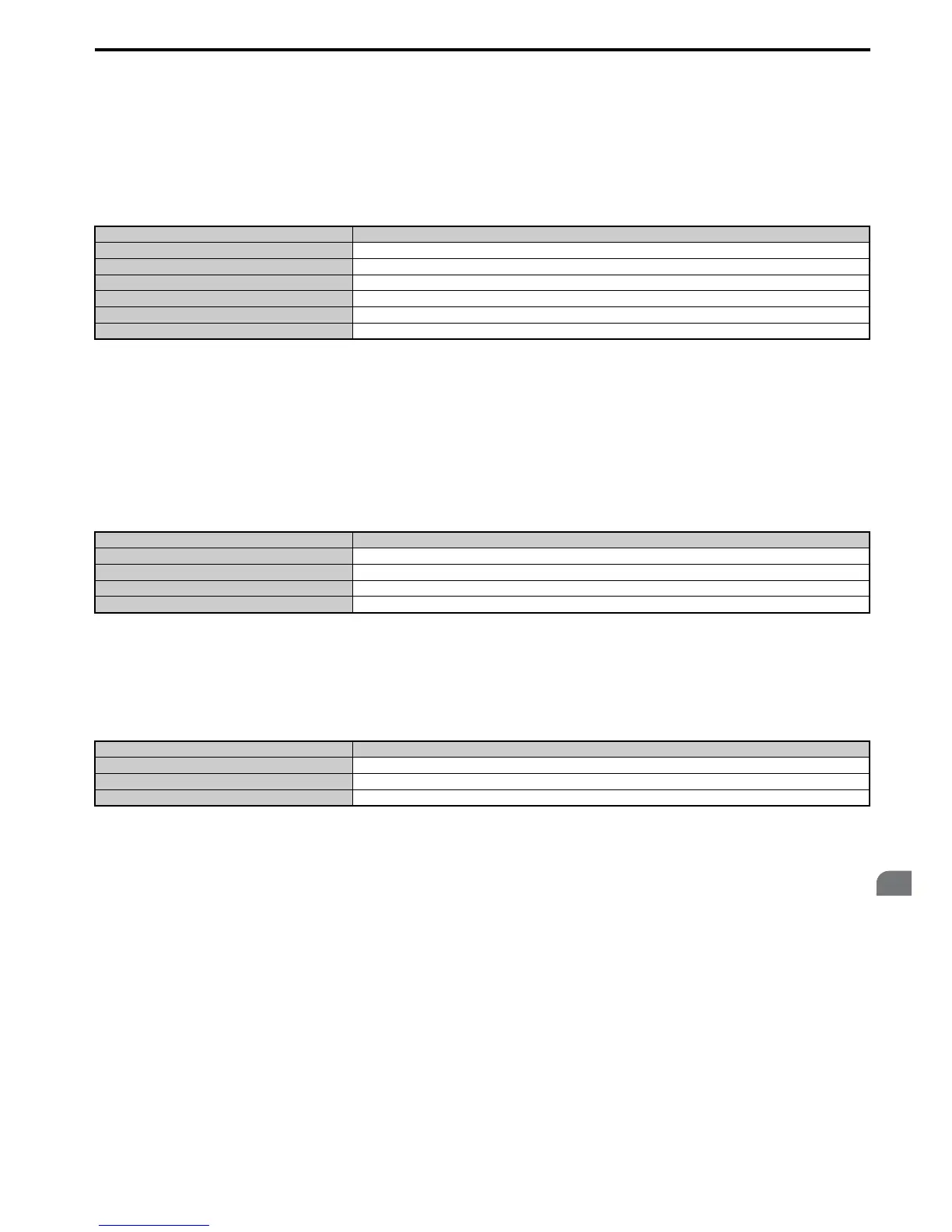
Table 5.8 PID Setpoint Sources
Note: A duplicate allocation of the PID setpoint input will result in an oPE alarm.
■ PID Feedback Input Methods
Either one feedback signal can be input for normal PID control, or two feedback signals can be input for controlling a
differential process value.
Normal PID Feedback
The PID feedback signal can be input from one of the sources listed below.
Table 5.9 PID Feedback Sources
Note: A duplicate allocation of the PID feedback input will result in an oPE alarm.
Differential Feedback
The second PID feedback signal for differential feedback can come from the sources listed below. The differential
feedback function is automatically enabled when a differential feedback input is assigned.
Table 5.10 PID Differential Feedback Sources
Note: A duplicate allocation of the PID differential feedback input will result in an oPE alarm.
PID Setpoint Source Settings
Analog Input A1 Set H3-02 = C
Analog Input A2 Set H3-10 = C
Analog Input A3 Set H3-06 = C
MEMOBUS/Modbus Register 0006H Set bit 1 in register 000FH to 1 and input the setpoint to register 0006H
Pulse Input RP Set H6-01 = 2
Parameter b5-19 Set parameter b5-18 = 1 and input the PID setpoint to b5-19
PID Feedback Source Settings
Analog Input A1 Set H3-02 = B
Analog Input A2 Set H3-10 = B
Analog Input A3 Set H3-06 = B
Pulse Input RP Set H6-01 = 1
PID Differential Feedback Source Settings
Analog Input A1 Set H3-02 = 16
Analog Input A2 Set H3-10 = 16
Analog Input A3 Set H3-06 = 16

 Loading...
Loading...












