■ C3-05: Output Voltage Limit Operation Selection
Determines if the motor flux reference is automatically reduced when output voltage reaches the saturation range.
If the input power supply voltage is low or the motor has a high voltage rating, this function can help improve the speed
precision when moving heavy loads at high speeds. When this function is enabled, the reduction in flux causes a slightly
higher current at high speed. Keep this in mind when selecting the drive.
Setting 0: Disabled
Setting 1: Enabled
■ C3-21: Motor 2 Slip Compensation Gain
Used to improve speed accuracy for motor 2. Functions in the same way that C3-01 functions for motor 1.
Adjust this parameter only after the motor rated current (E4-01), motor rated slip (E4-02), and the motor no-load current
(E4-03) have all been set.
Refer to C3-01: Slip Compensation Gain on page 167 for details on adjusting this parameter.
Note: Default setting is 0.0 in V/f Control (A1-02 = 0). Default setting is 1.0 in Open Loop Vector Control (A1-02 = 2) and Closed
Loop Vector Control (A1-02 = 3). In Closed Loop Vector Control, slip compensation gain acts as an adaptable gain.
■ C3-22: Motor 2 Slip Compensation Primary Delay Time
Functions for motor 2 in the same way that C3-02 functions for motor 1.
Refer to C3-02: Slip Compensation Primary Delay Time on page 168 for instructions on how to adjust this parameter.
Note: The default for V/f Control (A1-02 = 0) is 2000 ms. The default for Open Loop Vector Control (A1-02 = 2) is 200 ms.
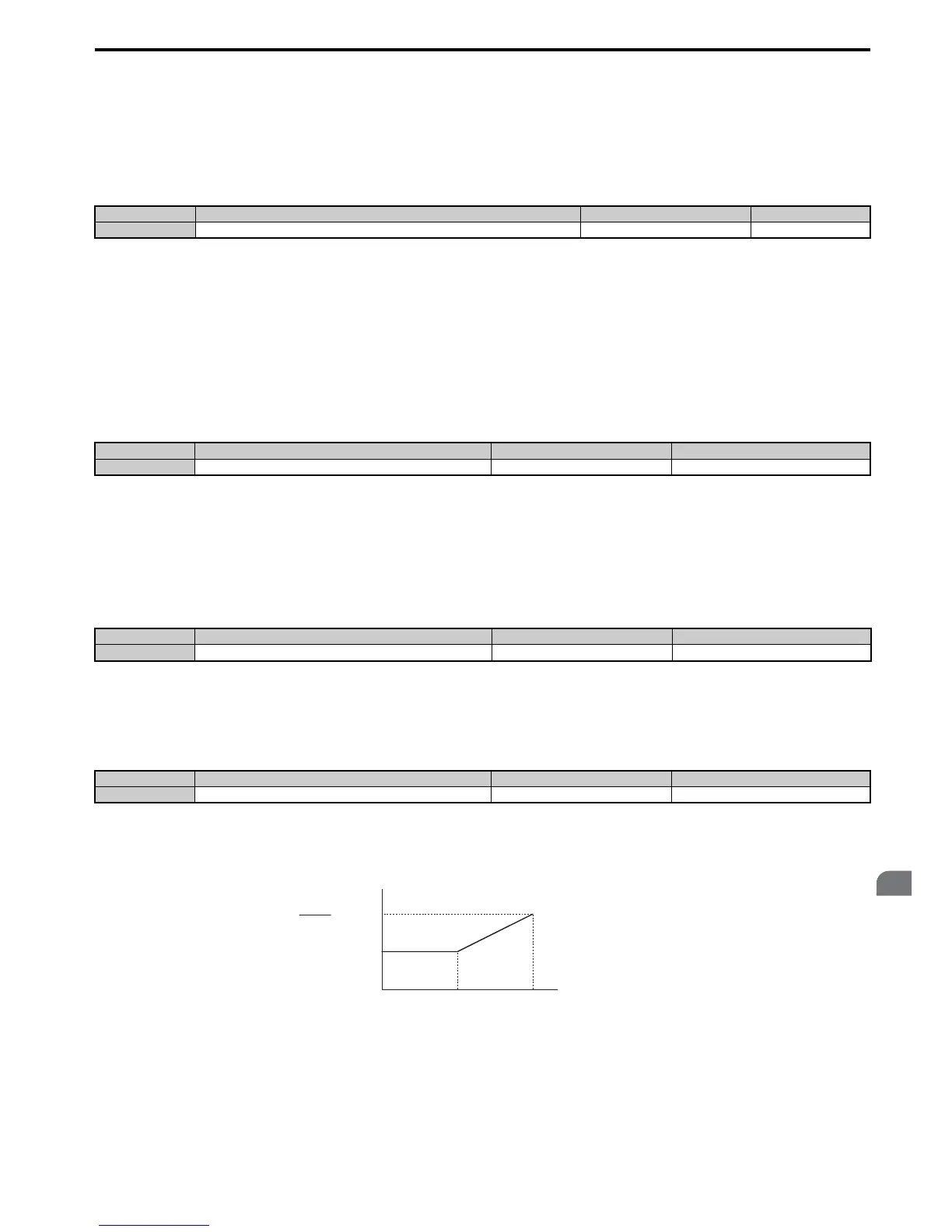
■ C3-23: Motor 2 Slip Compensation Limit
Sets the upper limit for the slip compensation function as a percentage of the motor rated slip (E4-02).
The slip compensation limit is constant throughout the constant torque range (frequency reference ≤ E3-06). In the
constant power range (frequency reference ≥ E3-06), it is increased based on C3-23 and the output frequency as shown in
the following diagram.
Figure 5.34
Figure 5.34 Slip Compensation Limit
No. Parameter Name Setting Range Default
C3-05 Output Voltage Limit Operation Selection 0 or 1 0
No. Parameter Name Setting Range Default
C3-21 Motor 2 Slip Compensation Gain 0.0 to 2.5 Determined by E3-01
No. Parameter Name Setting Range Default
C3-22 Motor 2 Slip Compensation Primary Delay Time 0 to 10000 ms Determined by A1-02
No. Parameter Name Setting Range Default
C3-23 Motor 2 Slip Compensation Limit 0 to 250% 200%

 Loading...
Loading...












