Input Value Polarity
The direction of the input values described above depends on the polarity of the Run command and the input value.
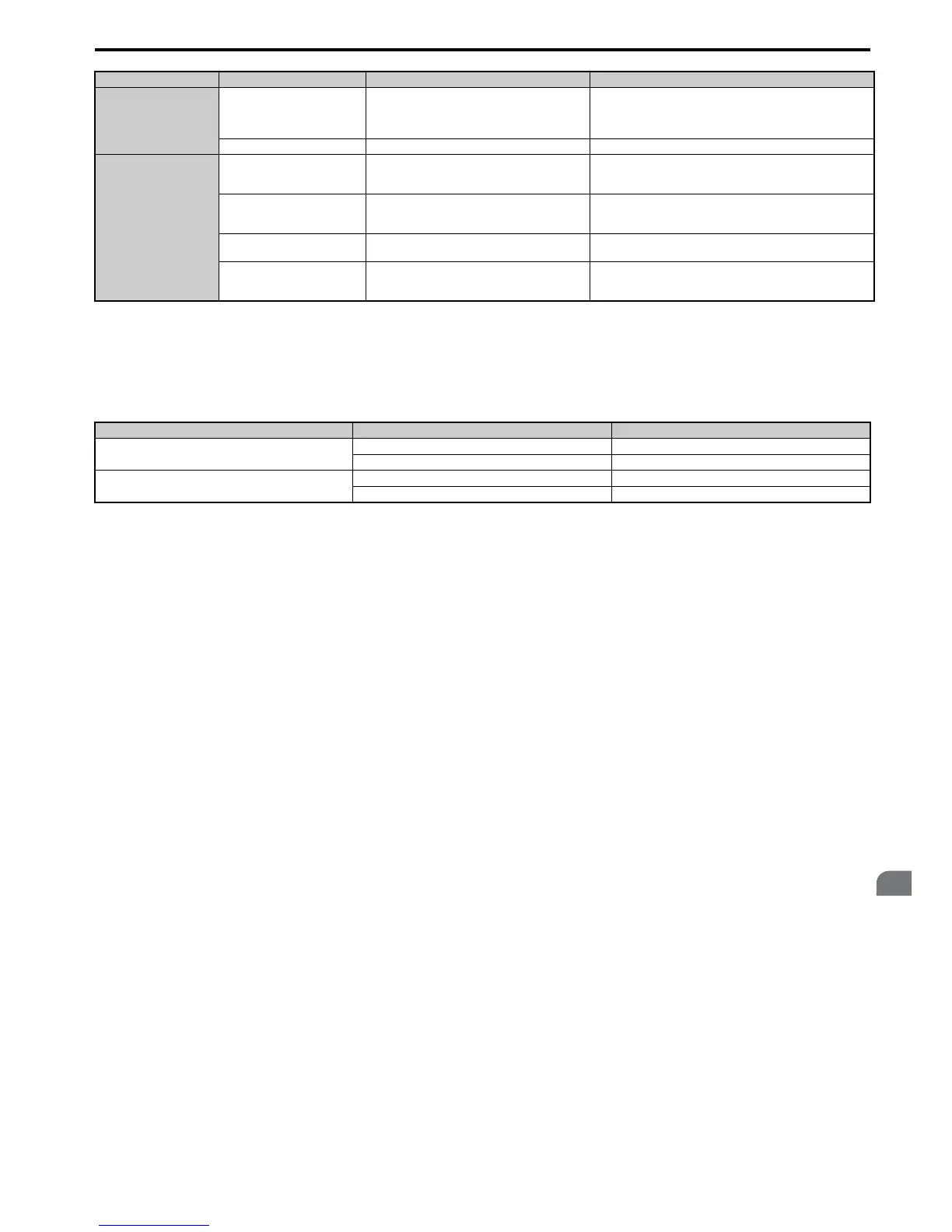
Table 5.19 Torque Control Signal Polarity
Example:
• With a Forward run command and a positive torque reference signal the internal torque reference will be positive, i.e.,
in the forward direction.
• With a Forward run command and a negative torque reference signal the internal torque reference will be negative, i.e.,
in the reverse direction.
When analog inputs are used, negative input values can be generated by
• applying negative voltage input signals.
• using positive analog input signals but setting the analog input bias to negative values so that the input value can be
negative.
When MEMOBUS communication or a communication option card is used, only positive input values can be set.
Independent of its input source, the polarity of the torque reference signal can be inverted using a digital input that is
programmed for H1- = 78. Use this function to input negative torque reference values when using MEMOBUS or a
communication option card.
Speed Limit
Signal selected as frequency
reference source
d5-03 = 1
The speed limit is taken from the input selected as
frequency reference source in parameter b1-01 or b1-
15.
<1>
The settings in C1- for accel/decel times and in C2- for S-
curves are applied to the speed limit value.
Parameter d5-04 d5-03 = 2 –
Torque Compensation
Analog inputs A1/A2/A3 H3-02, H3-06, or H3-10 = 14
<1>
Make sure the signal level settings for the input terminal selected
match the signal used. Refer to H3: Multi-Function Analog Inputs
on page 234 for details on adjusting analog input signals.
Analog Option Card
• F2-01 = 0
• H3-02, H3-06, or H3-10 = 14
<1>
The H3- settings become effective for the option card input
terminals. Make sure the signal level settings for the input terminal
selected match the signal used.
MEMOBUS Register 0005h
Set Register 000Fh, bit 3 = 1 to enable the torque
reference setting by register 0005h
–
Communication Option Card
F6-06 = 1
Refer to the option card manual for details about
setting the torque compensation value.
–
<1> Sets analog input terminals A1, A2, and A3 to supply the speed limit, torque reference, or torque compensation. An oPE error will occur if two
analog inputs are set for the same function.
Run Command Direction Input Value Polarity Input Value Direction
Forward
+ (positive) Forward direction
- (negative) Reverse direction
Reverse
+ (positive) Reverse direction
- (negative) Forward direction
Input Value Signal Source Settings Remarks

 Loading...
Loading...












