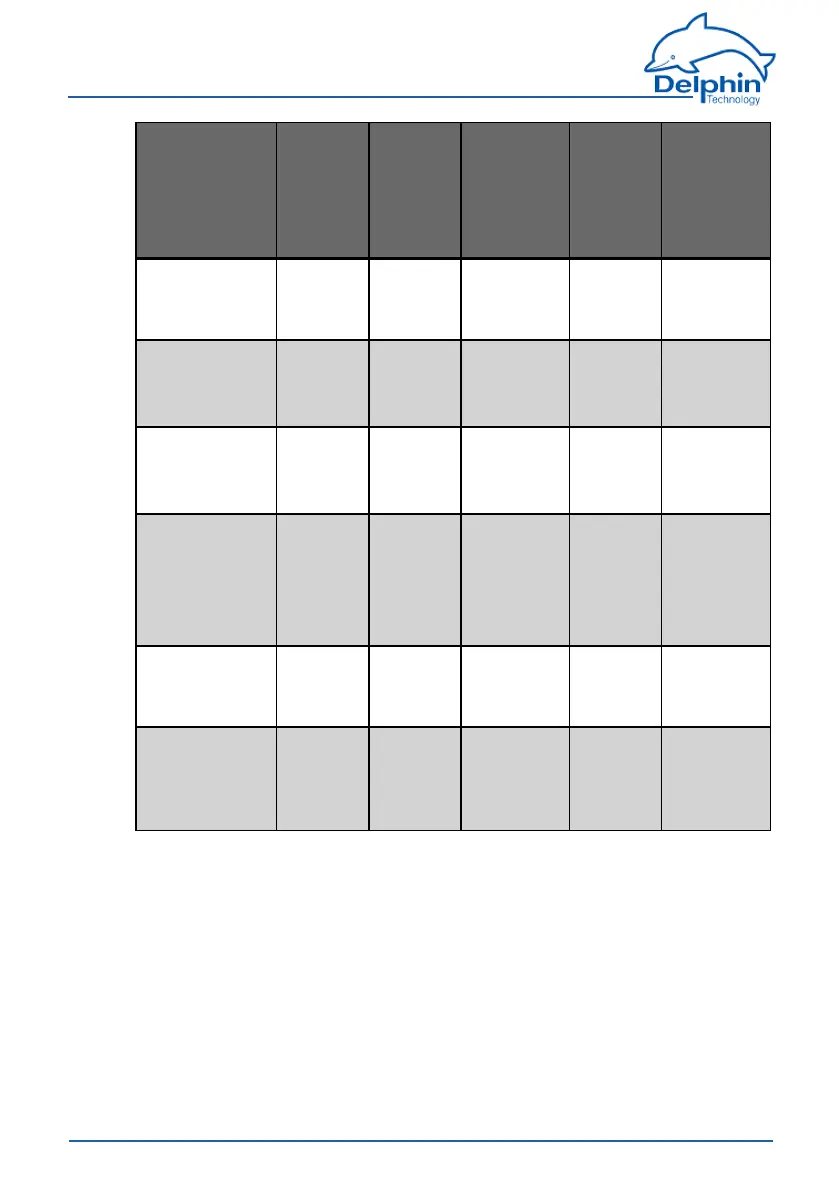
ProfiMessage
Controller
type
Loop
(with com-
pensation)
P I PI PD PID
Puredeadtime Unusable
Alittle
worse
thanPI
Setpoint
anddis-
turbance
Unusable Unusable
Deadtimeand
delay
1.Order
Unusable
Worse
thanPI
Alittle
worsethan
PID
Unusable
Setpoint
anddis-
turbance
Deadtimeand
delay
2.Order
Unsuit-
able
Bad
Worse
thanPID
Bad
Setpoint
anddis-
turbance
Delay
1.Orderand
smalldead
time(delay
time)
Refer-
ence
Unsuit-
able
Inter-
ference
Setpoint
with
delay
time
Dis-
turbance
withdelay
time
Higherorder
Unsuit-
able
Worse
thanPID
Alittle
worsethan
PID
Unsuit-
able
Setpoint
anddis-
turbance
Withoutcom-
pensationand
withdelay
Setpoint
(without
delay)
Unus-
able,
unstable
Dis-
turbance
(without
delay)
Refer-
ence
Inter-
ference
4.7.14.2 Controllerparametersettings
Variousmethodshavebeenestablishedtodeterminecontrollerparameters.This
introductiondescribestheChien,HronesandReswikconfigurationguidelines.
Youcanfindfurtherconfigurationguidelinesandmethodsinrelatedspecialistlit-
erature.
Topics
4.7.14.2.1 Configurationguidelinesforcontrolpathswithequalisation:
Determinethefollowingcontrolpathcharacteristicvaluesfromthecontrolpath
stepresponse:
124
Delphin Technology AG
Dezember 2015
ProfiMessage Manual