1 Program Framework of a DVP-PM Series Motion Controller
DVP-20PM Application Manual
1-6
P subroutine Description
Executing a P
subroutine
1. O100 can call P subroutines.
2. Ox motion subroutines can call P subroutines.
Operation
characteristic
Whenever a P subroutine is enabled, it is executed once. If a Pn subroutine needs to
be executed again, it has to be enabled again.
Instruction
supported
1. If P subroutines are called by O100, the P subroutines will support basic
instructions and applied instructions.
2. If P subroutines are called by Ox motion subroutines, the P subroutines will
support basic instructions, applied instructions, motion instructions, and G-codes.
Note: If P subroutines are called by Ox motion subroutines, users have to avoid using
pulse instructions.
Number
There are 256 P subroutines in a program.
Characteristic
and function
1. P subroutines are general subroutines.
2. P subroutines can be called by O100 and Ox motion subroutines.
3. If P subroutines are used with O100 and Ox motion subroutines, the P
subroutines, O100, and the Ox motion subroutines can be arranged in any order.
1.4 Using O100, Ox Motion Subroutines, and P Subroutines
O100, Ox motion subroutines, and P subroutines are introduced in section 1.1~section 1.3. In this section,
a program composed of O100, Ox motion subroutines, and P subroutines is described.
1.4.1 Structure of a Program
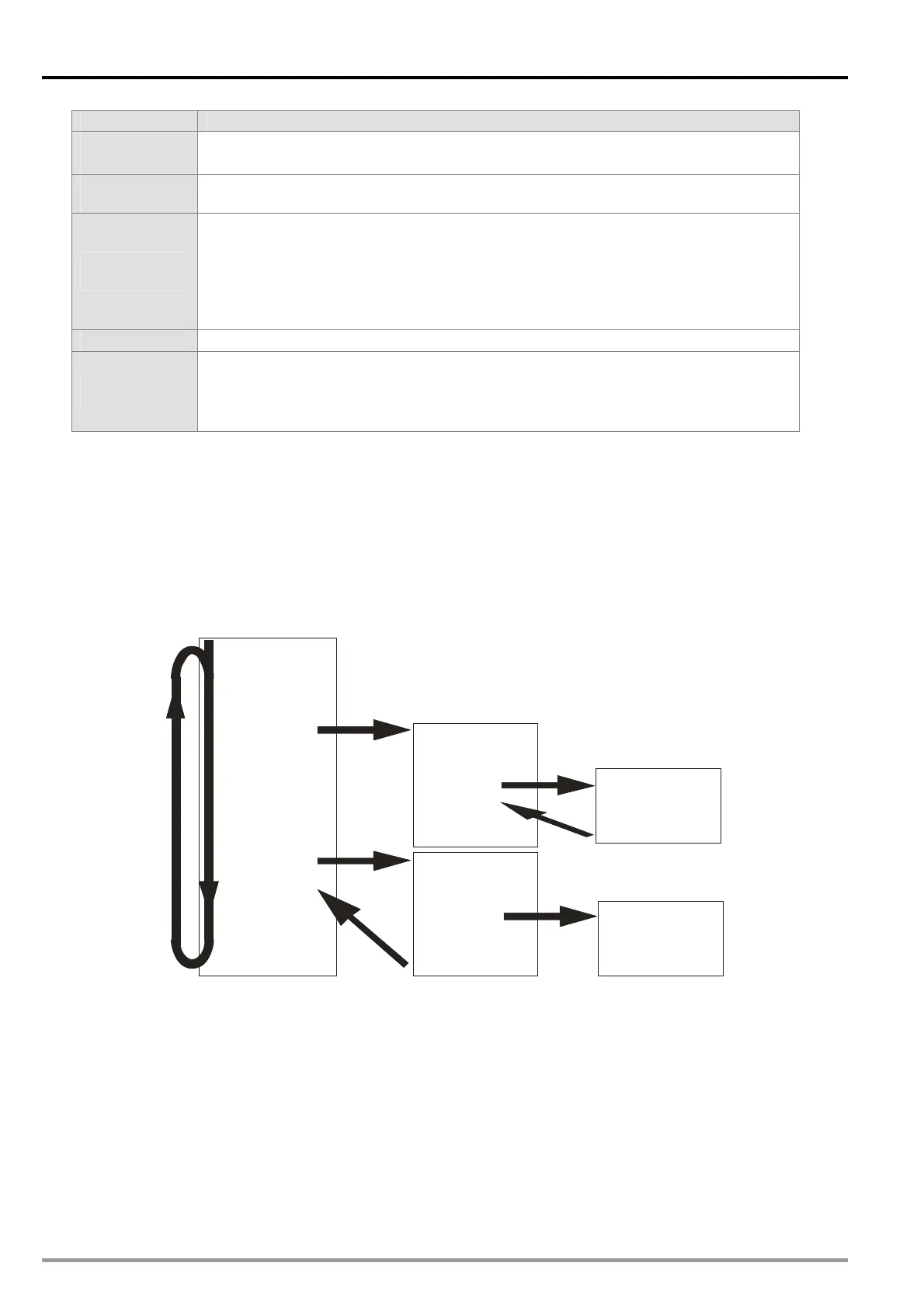
Suppose a program is composed of O100, Ox0, Ox3, P1, and P2. The five program blocks are shown
below.
Main program
O100
M102
.
.
.
.
.
.
.
.
.
.
.
.
.
Calling Ox0
Calling P2
Motion subroutine
Ox0
Calling P1
.
.
.
.
.
M2
Subroutine
P2
Calling Ox3
.
.
.
.
.
SRET
Motion subroutine
Ox3
.
.
M2
Subroutine
P1
.
.
SRET