5 Applied Instructions and Basic Usage
4. Modules which are supported
The motion control function block is T_AxisStatus supports DVP20PM00D and DVP20PM00M.
5.10.17 Setting the Present Position of an Axis
1. Motion control function block
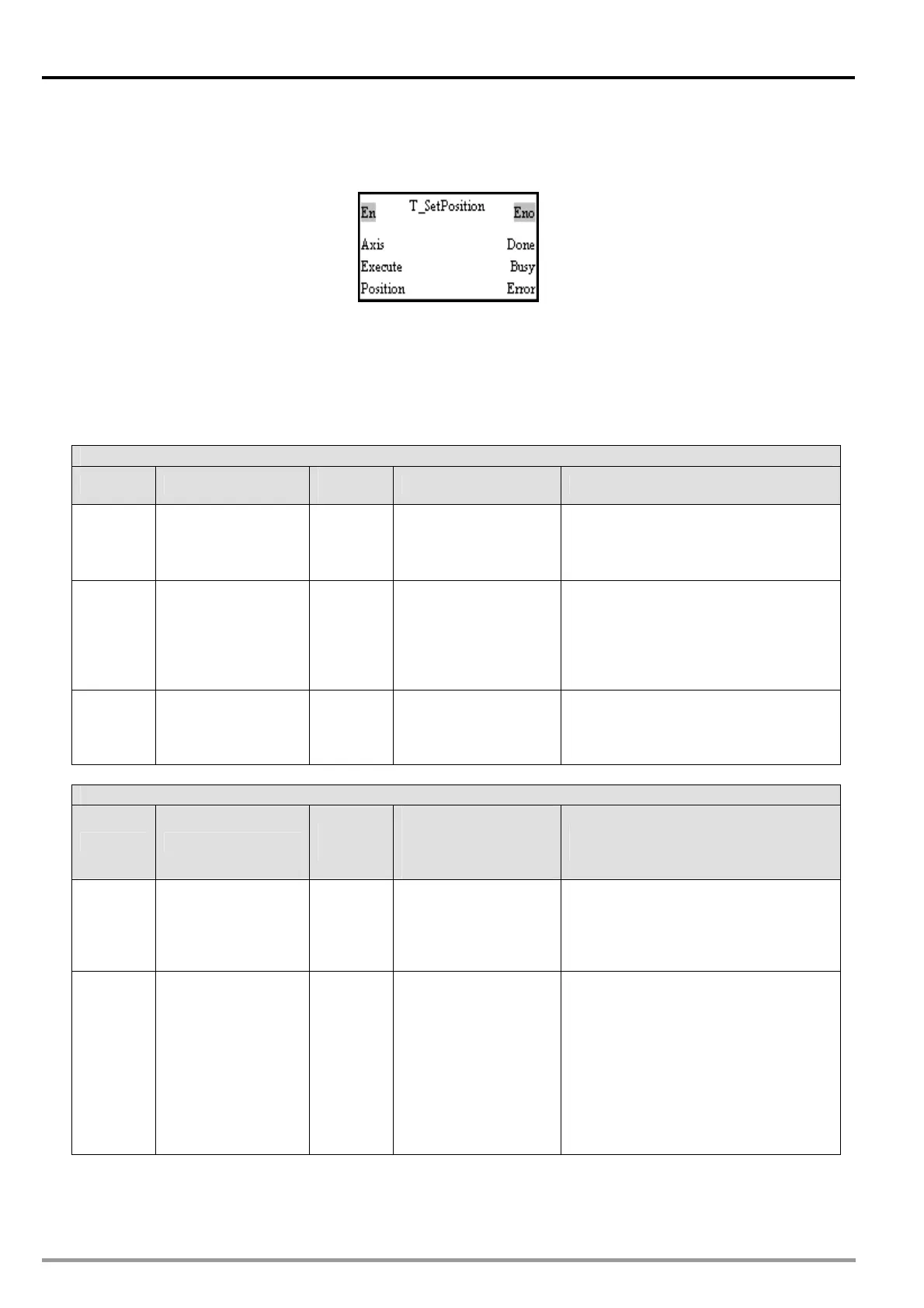
The motion control function block T_SetPosition is used to set the present position of an axis. The
value of the Axis input pin indicates an axis number. Users can set the present position of the axis
specified by means of the Position input pin. Note: To prevent errors from occurring, please avoid using
the motion control function block to set the present position of the master axis involved in cam motion
or gear motion.
2. Input pins/Output pins
Input pin
Name Function
Data
type
Setting value Time when a value is valid
Axis Motion axis number WORD
DVP20PM00D:
K1~K2
DVP20PM00M:
K1~K3
The value of the Axis input pin is valid
when there is a transition in the
Execute input pin’s signal from low to
high.
Execute
Motion is started
when there is a
transition in the
Execute input pin’s
signal from low to
high.
BOOL True/False -
Position
Present position of
the axis specified
DWORD
K-2,147,483,648~
K2,147,483,647
The value of the Position input pin is
valid when there is a transition in the
Execute input pin’s signal from low to
high.
State output pin
Name Function
Data
type
Time when there is
a transition in an
output pin’s signal
from low to high
Time when there is a transition in an
output pin’s signal from high to low
Done
The execution of
the motion control
function block is
complete.
BOOL
The writing of a
position is
complete.
There is a transition in the Done
output pin’s signal from high to low
when there is a transition in the
Execute input pin’s signal from
high to low.
Busy
The motion control
function block is
being executed.
BOOL
There is a
transition in the
Busy output pin’s
signal from low to
high when there is
a transition in the
Execute input
pin’s signal from
low to high.
There is a transition in the Busy
output pin’s signal from high to low
when there is a transition in the
Done output pin’s signal from low
to high.
There is a transition in the Busy
output pin’s signal from high to low
when there is a transition in the
Error output pin’s signal from low
to high.
DVP-20PM Application Manual
5-194