5 Applied Instructions and Basic Usage
5.10.2 Relative Single-speed Motion
1. Motion control function block
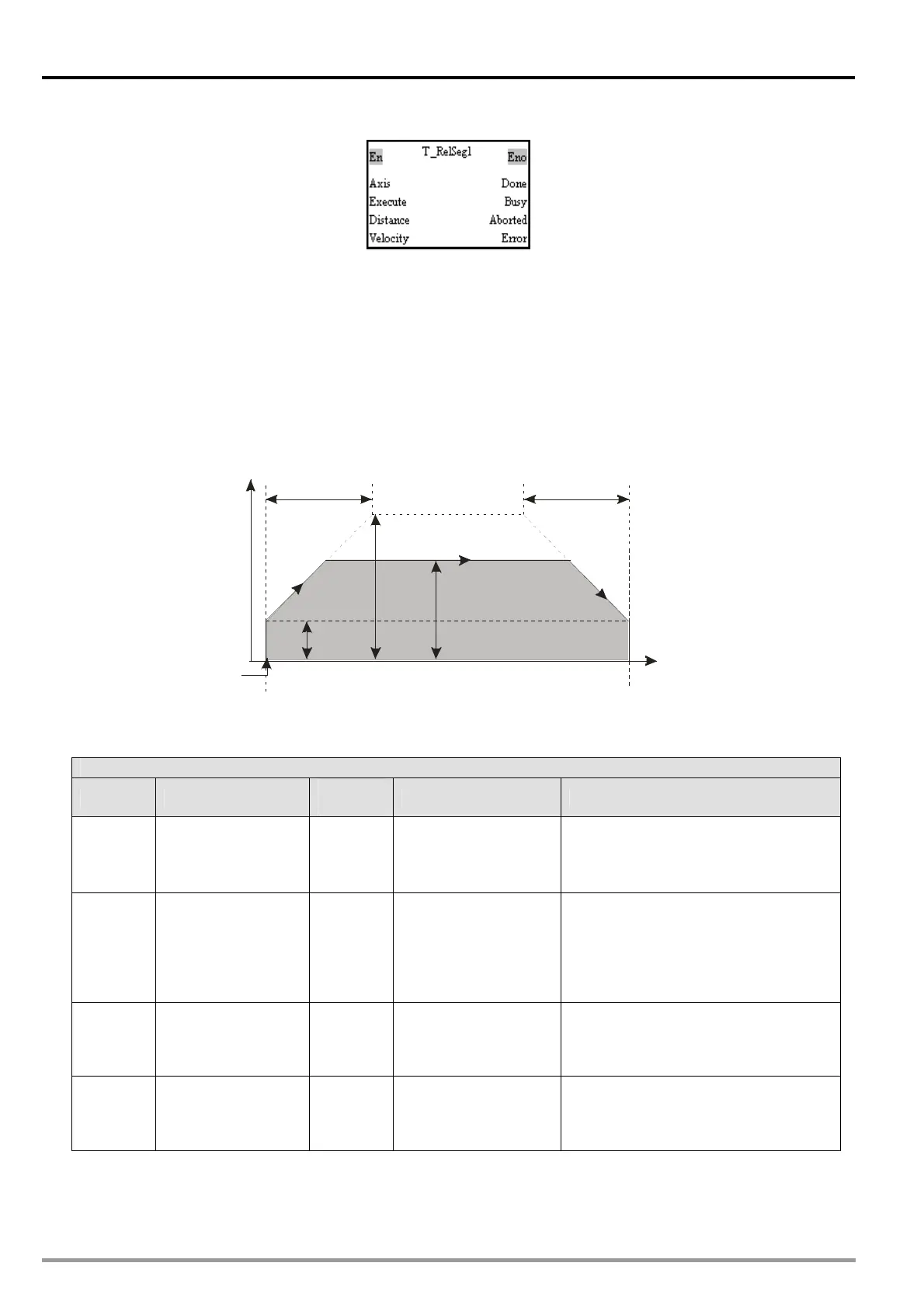
The motion control function block T_RelSeg1 is used to start relative single-speed motion. After relative
single-speed motion is started, the speed of the relative single-speed motion will increase from the
V
BIAS
set to the velocity set. The speed of the relative single-speed motion will not decrease from the
velocity set to the V
BIAS
set until the distance for which the relative single-speed motion moves is the
distance set. Users can set the Vbias input pin, the Vmax input pin, the Tacc input pin, and the Tdec
input pin in the motion control function block T_AxisSetting1. The number of pulses is a unit for the
Distance input pin, and the number of pulses per second is a unit for the Velocity input pin. Users can
change the unit used by means of the motion control function block T_AxisSetting2.
Speed
T
ACC
T
DEC
V
MAX
V
BIAS
Execute
Velocity
Position
Target distance
Start position
2. Input pins/Output pins
Input pin
Name Function
Data
type
Setting value Time when a value is valid
Axis Motion axis number WORD
DVP20PM00D:
K1~K2
DVP20PM00M:
K1~K3
The value of the Axis input pin is valid
when there is a transition in the
Execute input pin’s signal from low to
high.
Execute
Motion is started
when there is a
transition in the
Execute input pin’s
signal from low to
high.
BOOL True/False -
Distance Relative distance DWORD
K-2,147,483,648~
K2,147,483,647
The value of the Distance input pin is
valid when there is a transition in the
Execute input pin’s signal from low to
high.
Velocity Target speed DWORD K1~K2,147,483,647
When the motion control function
block is executed, the value of the
Velocity input pin is updated
repeatedly.
DVP-20PM Application Manual
5-156

 Loading...
Loading...








