13 Appendix
13.1 Appendix A: Error Code Table
After a program is written into a DVP-20PM series motion controller, the ERROR LED indicator will blink
and an error flag will be ON if an error occurs in O100 or an Ox motion subroutine. The reason for the error
occurring in O100 or an Ox motion subroutine may be that the use of operands (devices) is incorrect,
syntax is incorrect, or the setting of motion parameters is incorrect. Users can know the reasons for the
errors occurring in a DVP-20PM series motion controller by means of the error codes (hexadecimal codes)
stored in error registers.
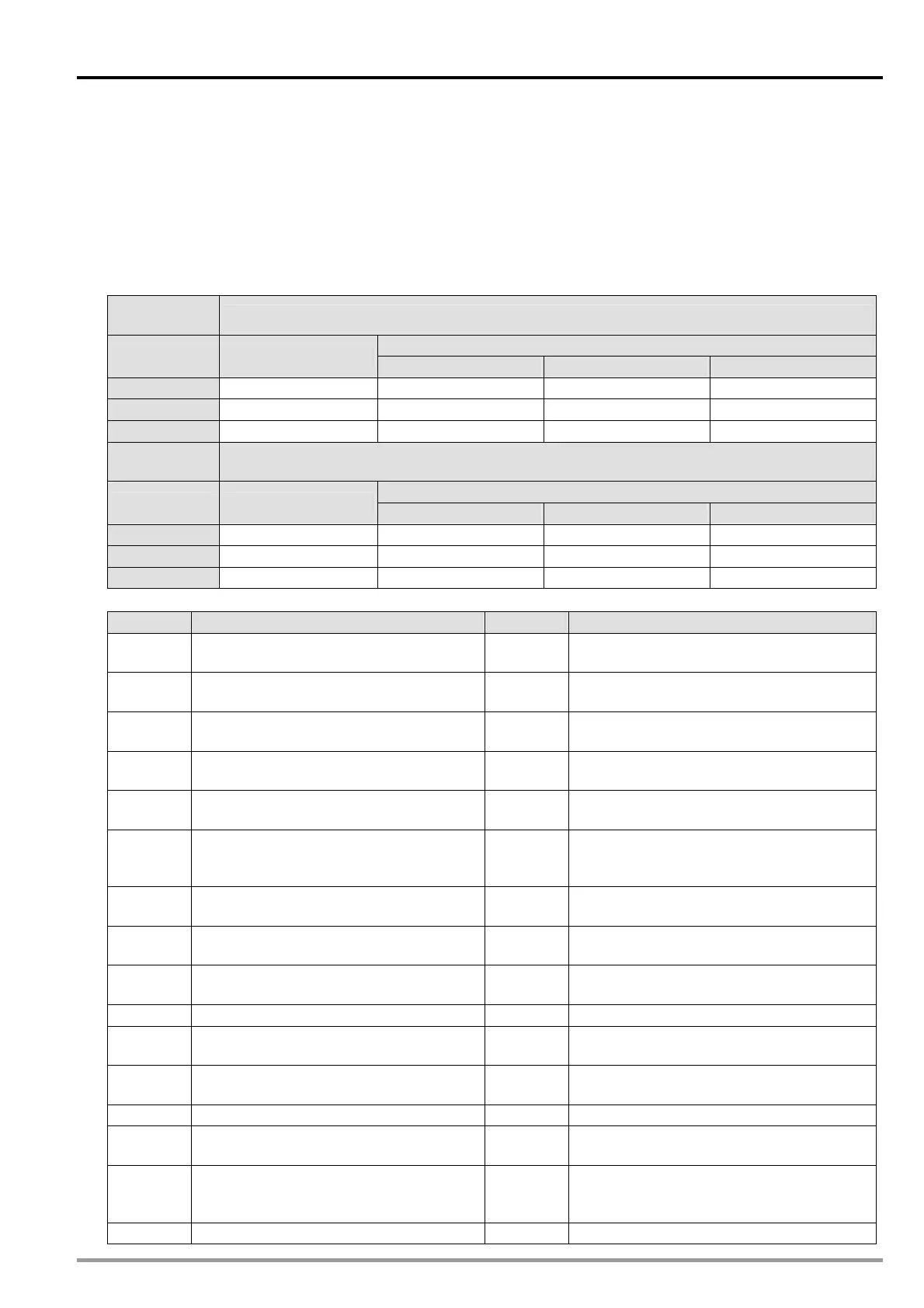
Error message table
Program
block
O100
Motion error
Error type Program error
X-axis Y-axis Z-axis
Error flag
M1953 M1793 M1873 M2033
Error register
D1802 D1857 D1937 D2017
Step number
D1803 D1869
Program
block
Ox
Motion error
Error type Program error
X-axis Y-axis Z-axis
Error flag
M1793 M1793 M1873 M2033
Error register
D1857 D1857 D1937 D2017
Step number
D1869 D1869
Program error codes and motion error codes (hexadecimal codes)
Error code Description Error code Description
0002 The subroutine used has no data. 0031
The positive-going pulses generated by
motion are inhibited.
0003
CJ, CJN, and JMP have no matching
pointers.
0032
The negative-going pulses generated by
motion are inhibited.
0004
There is a subroutine pointer in the main
program.
0033
The motor used comes into contact with the
left/right limit switch set.
0005 Lack of a subroutine 0040
A device exceeds the device range
available.
0006
A pointer is used repeatedly in the same
program.
0041
A communication timeout occurs when
MODRD/MODWR is executed.
0007 A subroutine pointer is used repeatedly. 0044
An error occurs when a device is modified
by a 16-bit index register/32-bit index
register.
0008
The pointer used in JMP is used
repeatedly in different subroutines.
0045
The conversion into a floating-point number
is incorrect.
0009
The pointer used in JMP is the same as
the pointer used in CALL.
0E18
The conversion into a binary-coded
decimal number is incorrect.
000A
A pointer is the same as a subroutine
pointer.
0E19
Incorrect division operation (The divisor is
0.)
0011 Target position (I) is incorrect. C401 General program error
0012 Target position (II) is incorrect. C402
LD/LDI has been used more than nine
times.
0021 Velocity (I) is incorrect. C404
There is more than one nested program
structure supported by RPT/RPE.
0022 Velocity (II) is incorrect. C405 SRET is used between RPT and RPE.
0023
The velocity (V
RT
) of returning home is
incorrect.
C4EE
There is no M102 in the main program, or
there is no M2 in a motion subroutine.
0024
The velocity (V
CR
) to which the velocity of
the axis specified decreases when the
axis returns home is incorrect.
C4FF
A wrong instruction is used, or a device
used exceeds the range available.
0025 The JOG speed set is incorrect.
DVP-20PM Application Manual
15-1

 Loading...
Loading...








